My current application involves driving a small linear motor for accurate position control using InstaSpin on a TMS320F28069M. Presently i'm developing the prototype using a DRV8312EVM board.
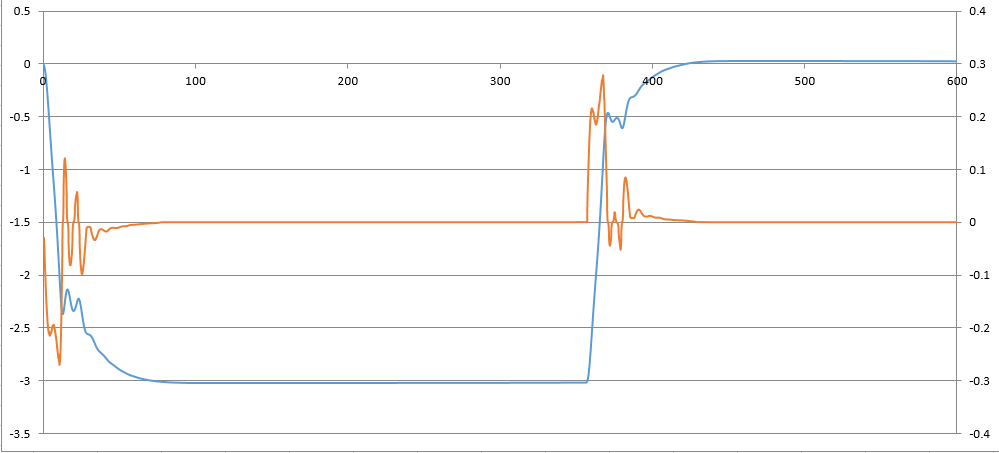
The issue i'm running into involved using the SpinTac Position control in Lab 13c, when the linear motor gets within about 0.5mm of the target position the motion profile appears to change, see the plot below for a visual representation. I'm a bit overwhelmed by all the knobs that are available for tuning and setting up InstaSpin so i'm not sure if there is some function or the SpinTac position planner that is taking over and changing the profile, or how exactly to tune that behavior.
I'm not looking for a detailed solution, just wondering if anyone with a more intimate knowledge of InstaSpin implementations can look at this plot and somehow know what might be causing it.
Legend: Blue = position (mm), Orange = velocity(m/s). Time scale in [ms]