Hi,
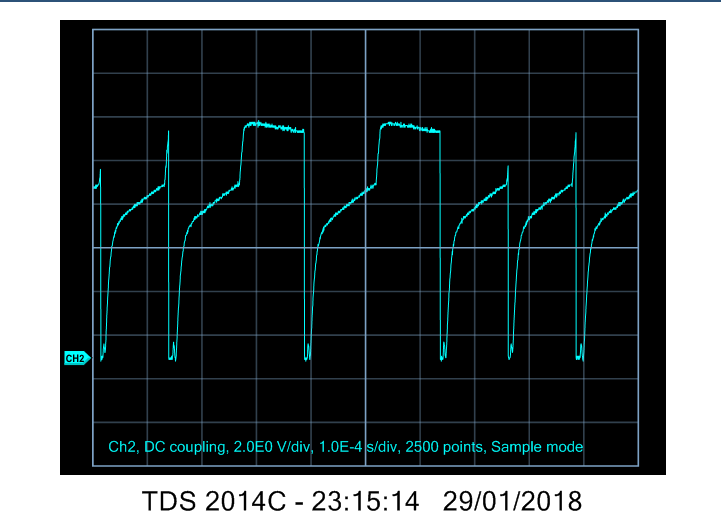
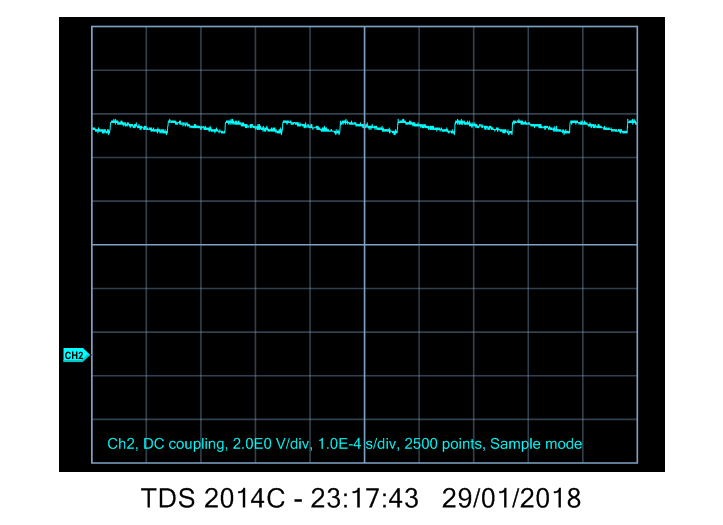
Using the DRV8301-69M-Kit, we developed our own control board including the DRV8301 driver. All the other power parts remains on a separate pcb. This is working great as long as we use shunt resistors. However, as we now want to make the power-pcb using LEM:s hall current sensors we ran into problems, since the DRV8301 has its own unamplified shunt current sensor inputs. This is no good since our LEM sensors output 1.65V where the shunt resistors used to output a very much lower voltage. If we try to run an identification we get issues with the drv8301 throwing an error directly, since it beleives we have an overcurrent situation. So, here are a few questions;
1. Can we still use this setup and somehow tell the drv8301 to neglect the SN/SP inputs? The pdf is a bit cryptical. "Shunt amplifier 1 shorts input pins and disconnects from load for external calibration." What is the meaning with "shorts"? Shorts to ground? How and where in let's say lab2b would we send the command to the drv8301 to short the shunt inputs?
2. Or is this solution impossible? Are we forced to use shunt resistors with drv8301? If so which driver would you recommend instead for hall current sensor setups? Which are the necessary changes to be made getting this to work?
Thank you!
/Mikael