Dear sir/madam,
I have a small doubt in controlling BLDC motor, when motor is operated in 6-step commutation sequence using hall sensors as feedback, phase current shape should be in quasi-square wave.
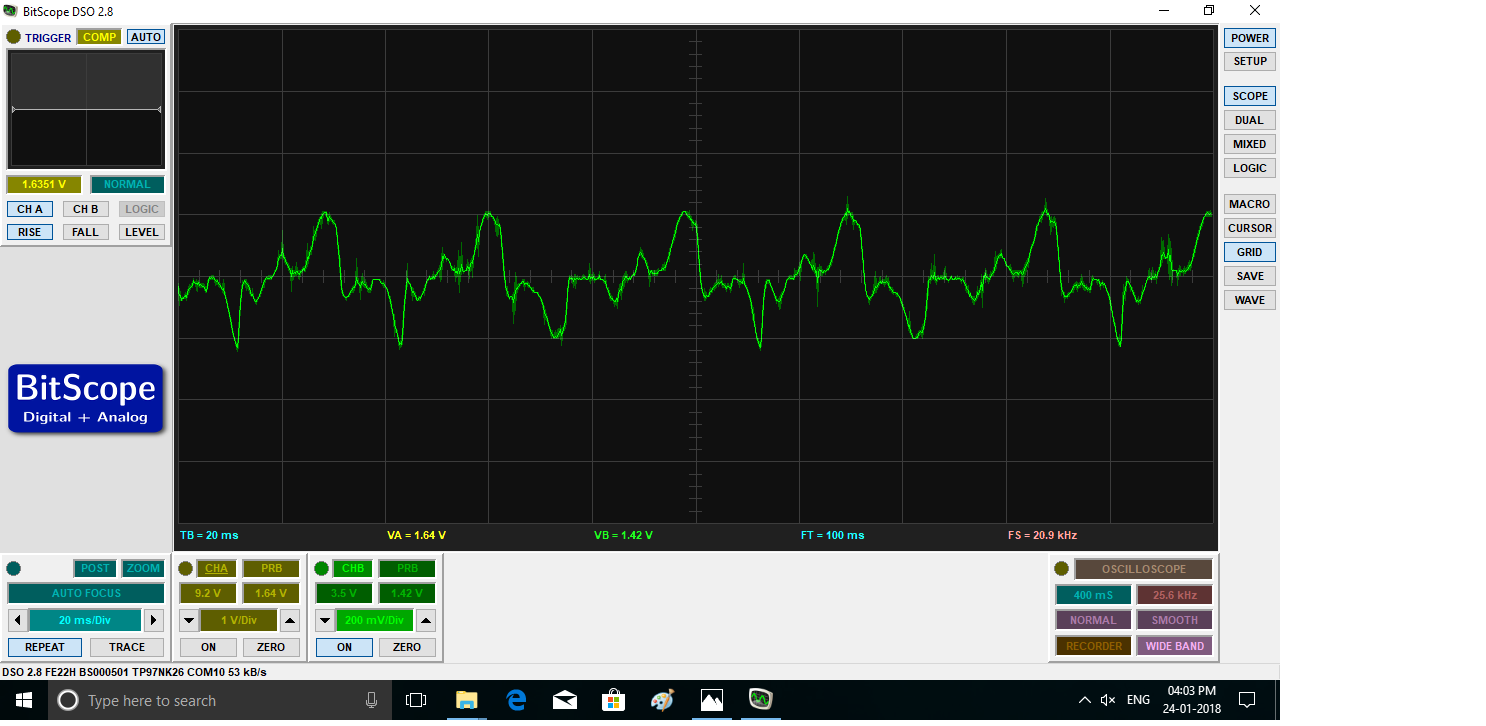
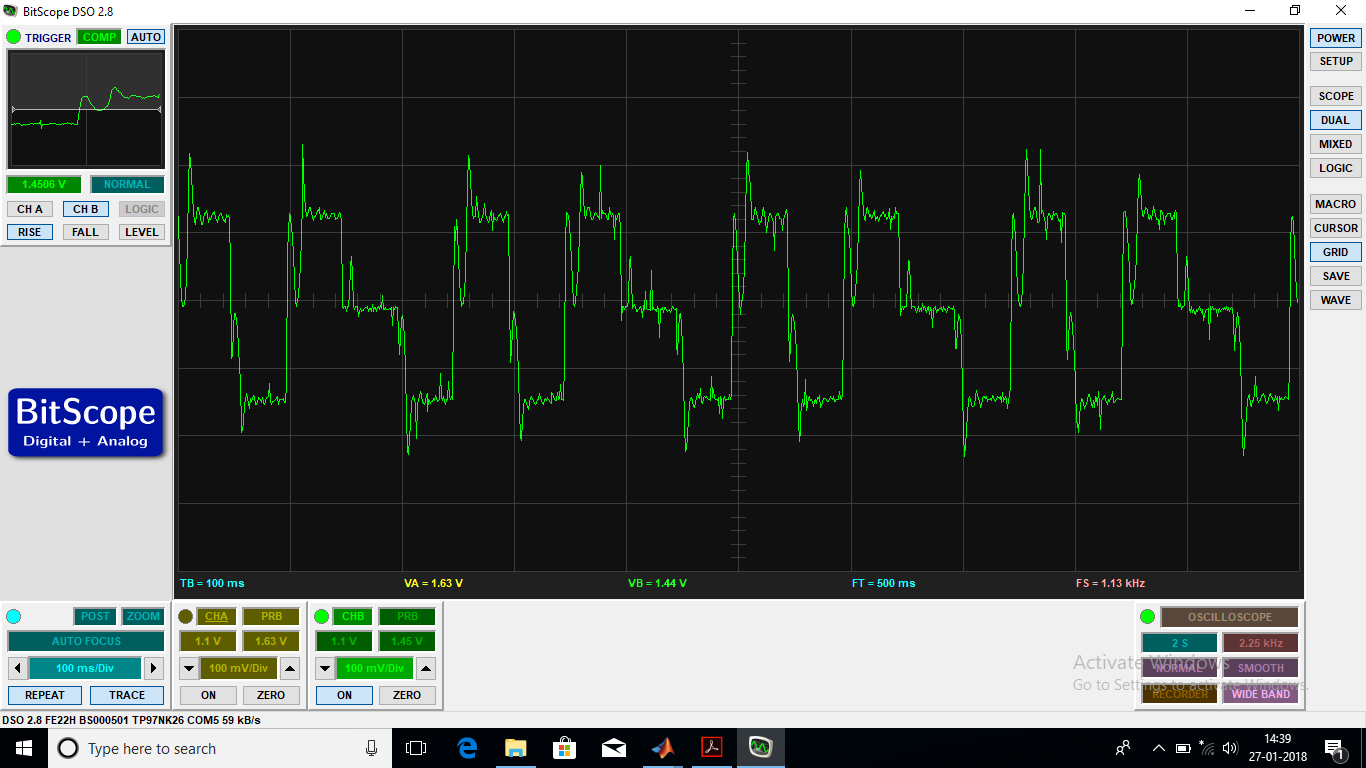
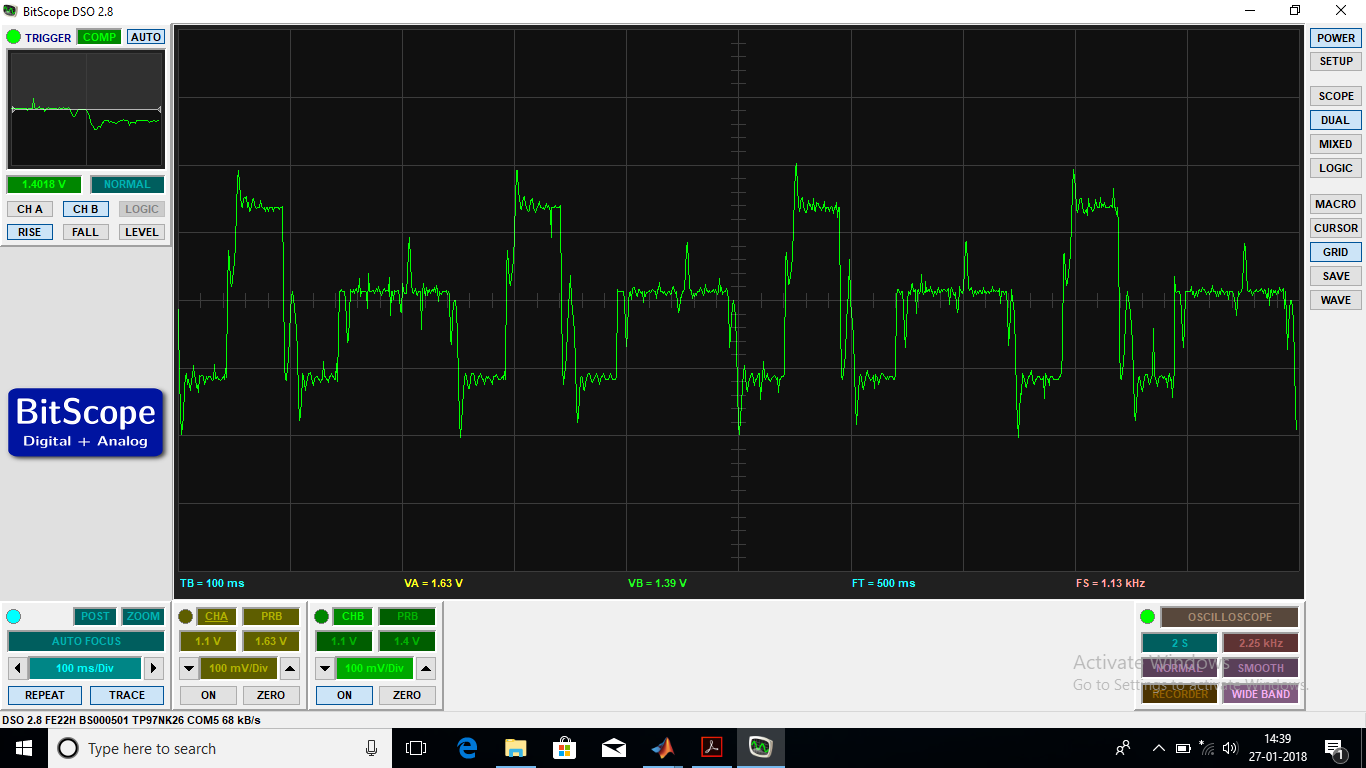
When i am simulating, Bldc motor logic in Matlab waveforms are generating correctly but in Realtime hardware the waveforms are not in correct shape.
I have tried at low speed also, at that time one commutation step signal is missing every time.Current waveforms are attached to this thread.
At high speed, it generating more spikes across the current sensor (ACS712).
I am using tms320c28069 micro controller.
Regards,
krishna kanth.