Other Parts Discussed in Thread: C2000WARE
Tool/software: Code Composer Studio
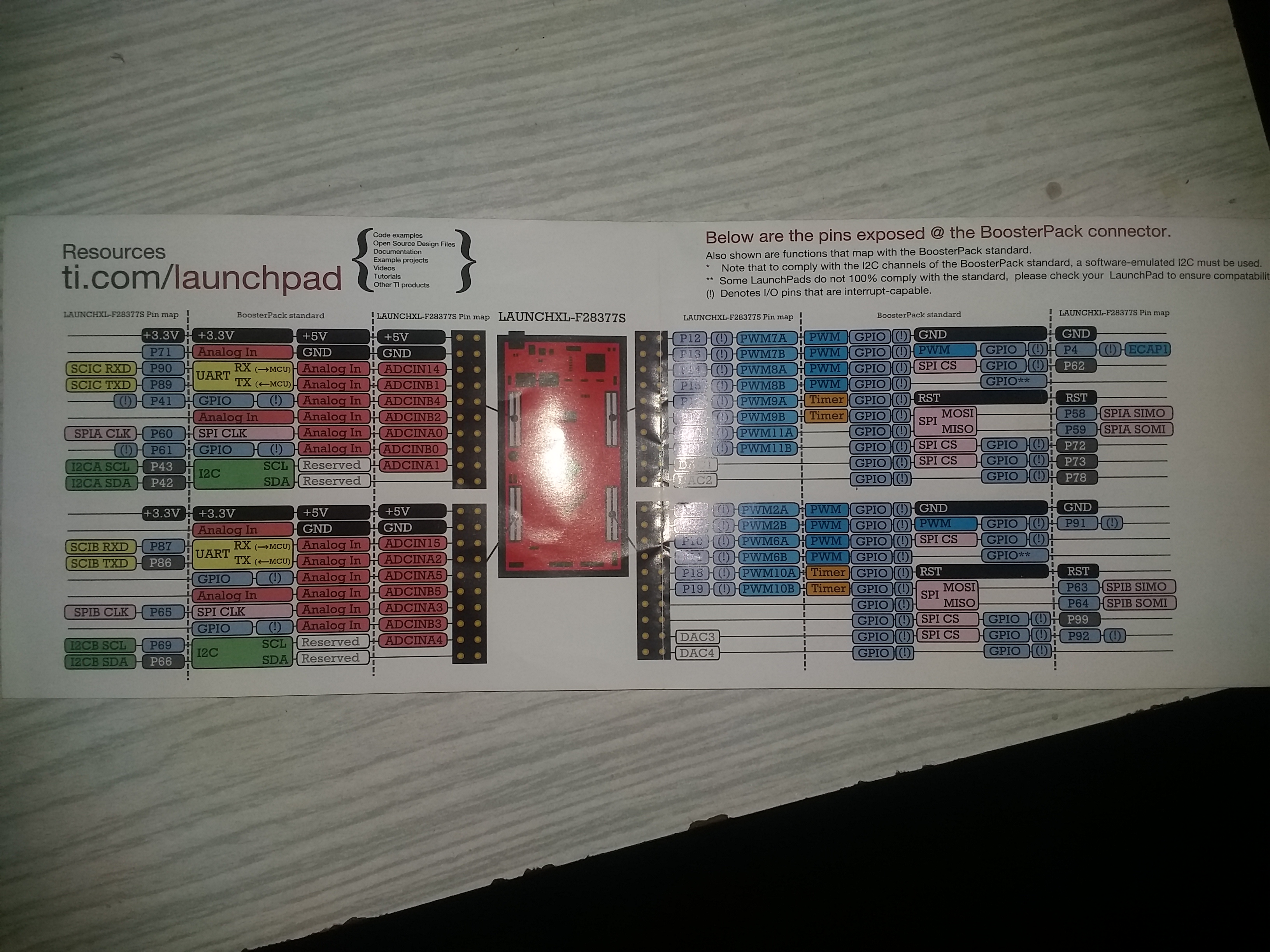
I've been working on LaunchPad F28377S for a while now. I recently got an OLED I2C display to work with. In TMS320F28377S technical reference guide, they mentioned GPIOs 42,43 and GPIOs 91,92 both for I2C-A. But I decided to settle on the GPIOs 42 and 43. I couldn't get any output at those pins (neither clock nor data). I've tried GPIOs 91, 92 but in vain. Here's my code:
#include "F28x_Project.h"
/**
* main.c
*/
#define OLED_I2C_ADDRESS 0x3C
// Control byte
#define OLED_CONTROL_BYTE_CMD_SINGLE 0x0080
#define OLED_CONTROL_BYTE_CMD_STREAM 0x0000
#define OLED_CONTROL_BYTE_DATA_STREAM 0x0040
// Fundamental commands (pg.28)
#define OLED_CMD_SET_CONTRAST 0x0081 // follow with 0x7F
#define OLED_CMD_DISPLAY_RAM 0x00A4
#define OLED_CMD_DISPLAY_ALLON 0x00A5
#define OLED_CMD_DISPLAY_NORMAL 0x00A6
#define OLED_CMD_DISPLAY_INVERTED 0x00A7
#define OLED_CMD_DISPLAY_OFF 0x00AE
#define OLED_CMD_DISPLAY_ON 0x00AF
// Addressing Command Table (pg.30)
#define OLED_CMD_SET_MEMORY_ADDR_MODE 0x0020 // follow with 0x00 = HORZ mode = Behave like a KS108 graphic LCD
#define OLED_CMD_SET_COLUMN_RANGE 0x0021 // can be used only in HORZ/VERT mode - follow with 0x00 and 0x7F = COL127
#define OLED_CMD_SET_PAGE_RANGE 0x0022 // can be used only in HORZ/VERT mode - follow with 0x00 and 0x07 = PAGE7
// Hardware Config (pg.31)
#define OLED_CMD_SET_DISPLAY_START_LINE 0x0040
#define OLED_CMD_SET_SEGMENT_REMAP 0x00A1
#define OLED_CMD_SET_MUX_RATIO 0x00A8 // follow with 0x3F = 64 MUX
#define OLED_CMD_SET_COM_SCAN_MODE 0x00C8
#define OLED_CMD_SET_DISPLAY_OFFSET 0x00D3 // follow with 0x00
#define OLED_CMD_SET_COM_PIN_MAP 0x00DA // follow with 0x12
#define OLED_CMD_NOP 0x00E3 // NOP
// Timing and Driving Scheme (pg.32)
#define OLED_CMD_SET_DISPLAY_CLK_DIV 0x00D5 // follow with 0x80
#define OLED_CMD_SET_PRECHARGE 0x00D9 // follow with 0xF1
#define OLED_CMD_SET_VCOMH_DESELCT 0x00DB // follow with 0x30
// Charge Pump (pg.62)
#define OLED_CMD_SET_CHARGE_PUMP 0x008D // follow with 0x14
void oled_init(Uint16 Slave_address);
void I2C_Write(Uint16 Slave_address, Uint16 No_of_databytes, Uint16 Write_Array[]);
void I2C_WriteByte(Uint16 Slave_address, Uint16 databyte);
Uint16 pattern1[17] = {0x0040,0x0000,0x007E,0x0042,0x0042,0x0042,0x0042,0x007E,0x0000,0x0000,0x007E,0x0042,0x0042,0x0042,0x0042,0x007E,0x0000};
void i2c_a_gpio_init (void);
void I2CA_Init();
int main(void)
{uint32_t i;
InitSysCtrl();
InitGpio();
i2c_a_gpio_init ();
InitPieCtrl();
InitPieVectTable();
I2CA_Init();
I2caRegs.I2CMDR.bit.IRS = 0;
I2caRegs.I2CPSC.all = 19; // I2C clock should be between 7Mhz-12Mhz
I2caRegs.I2CCLKL = 45; // Prescalers set for 100kHz bit rate
I2caRegs.I2CCLKH = 45; // At a 10Mhz I2C clock
I2caRegs.I2CMDR.bit.IRS = 1;
Uint16 Slave_address = 0x003C;
oled_init(Slave_address);
Uint16 write_array[7] = {OLED_CONTROL_BYTE_CMD_STREAM,OLED_CMD_SET_COLUMN_RANGE,0x0000,0x007F,OLED_CMD_SET_PAGE_RANGE,0x0000,0x0007};
I2C_Write(Slave_address, 7, write_array);
I2C_Write(Slave_address,17, pattern1);
return 0;
}
void I2C_Write(Uint16 Slave_address, Uint16 No_of_databytes, Uint16 Write_Array[])
{
/*Uint16 i = 0;
I2caRegs.I2CSAR.all = Slave_address;
while(I2caRegs.I2CMDR.bit.STP != 0);
I2caRegs.I2CMDR.all = 0x2620;
I2caRegs.I2CCNT = No_of_databytes;
// Data Bytes to be transmitted
while(i < No_of_databytes)
{
while(I2caRegs.I2CSTR.bit.XRDY != 1);
DSP28x_usDelay(5000);
if (I2caRegs.I2CSTR.bit.XRDY == 1)
{
I2caRegs.I2CDXR.all = Write_Array[i++]; // Lower 16 address bits
}
}
while(I2caRegs.I2CSTR.bit.SCD != 1);
I2caRegs.I2CSTR.bit.SCD = 1; // Clear stop condition */
I2caRegs.I2CMDR.bit.IRS = 1; // reset I2C
// Make sure I2C is not busy and has stopped
while (I2caRegs.I2CSTR.bit.BB == 1); // busy loop
I2caRegs.I2CSTR.bit.SCD = 1; // Clear the SCD bit (stop condition bit)
while(I2caRegs.I2CMDR.bit.STP == 1); // stop bit loop
I2caRegs.I2CSAR.all = Slave_address; // I2C slave address
while (I2caRegs.I2CSTR.bit.BB == 1); // still busy?
I2caRegs.I2CCNT = No_of_databytes; // assume register address = 1 byte, and data is 1 byte
//I2caRegs.I2CMDR.all = 0x6E20; // start, stop, no rm, reset i2c 01101110 00100000
I2caRegs.I2CMDR.bit.NACKMOD = 0; // NACK mode bit
I2caRegs.I2CMDR.bit.FREE = 1; // Run free I2C when suspended
I2caRegs.I2CMDR.bit.STT = 1; // START condition bit
I2caRegs.I2CMDR.bit.STP = 1; // STOP condition bit
I2caRegs.I2CMDR.bit.MST = 1; // Master mode
I2caRegs.I2CMDR.bit.TRX = 1; // Transmitter mode
I2caRegs.I2CMDR.bit.XA = 0; // 7-bit addressing mode
I2caRegs.I2CMDR.bit.RM = 0; // Nonrepeat mode
I2caRegs.I2CMDR.bit.DLB = 0; // Digital loopback mode is disabled
I2caRegs.I2CMDR.bit.IRS = 1; // The I2C module is enabled
I2caRegs.I2CMDR.bit.STB = 0; // The I2C module is not in the START byte mode
I2caRegs.I2CMDR.bit.FDF = 0; // Free data format mode is disabled
I2caRegs.I2CMDR.bit.BC = 0; // 8 bits per data byte
Uint16 i;
for(i=0;i<No_of_databytes;i++)
{
while(I2caRegs.I2CSTR.bit.XRDY == 0); // Do nothing till bus is free
I2caRegs.I2CDXR.all = Write_Array[i]; // data to be sent (1 byte)
}
I2caRegs.I2CMDR.bit.STP = 1; // stop bit when CNT=0
while(!I2caRegs.I2CSTR.bit.SCD); // wait for STOP condition
}
void I2C_WriteByte(Uint16 Slave_address, Uint16 databyte)
{
Uint16 arr[1] = {databyte};
I2C_Write(Slave_address, 1, arr);
}
void oled_init(Uint16 Slave_address)
{
I2C_WriteByte(Slave_address,OLED_CONTROL_BYTE_CMD_STREAM);
// Follow instructions on pg.64 of the dataSheet for software configuration of the SSD1306
// Turn the Display OFF
I2C_WriteByte(Slave_address,OLED_CMD_DISPLAY_OFF);
// Set mux ration tp select max number of rows - 64
I2C_WriteByte(Slave_address,OLED_CMD_SET_MUX_RATIO);
I2C_WriteByte(Slave_address,0x3F);
// Set the display offset to 0
I2C_WriteByte(Slave_address,OLED_CMD_SET_DISPLAY_OFFSET);
I2C_WriteByte(Slave_address,0x00);
// Display start line to 0
I2C_WriteByte(Slave_address,OLED_CMD_SET_DISPLAY_START_LINE);
// Mirror the x-axis. In case you set it up such that the pins are north.
// I2C_WriteByte(Slave_address,0xA0); - in case pins are south - default
I2C_WriteByte(Slave_address,OLED_CMD_SET_SEGMENT_REMAP);
// Mirror the y-axis. In case you set it up such that the pins are north.
// I2C_WriteByte(Slave_address,0xC0); - in case pins are south - default
I2C_WriteByte(Slave_address,OLED_CMD_SET_COM_SCAN_MODE);
// Default - alternate COM pin map
I2C_WriteByte(Slave_address,OLED_CMD_SET_COM_PIN_MAP);
I2C_WriteByte(Slave_address,0x12);
// set contrast
I2C_WriteByte(Slave_address,OLED_CMD_SET_CONTRAST);
I2C_WriteByte(Slave_address,0x7F);
// Set display to enable rendering from GDDRAM (Graphic Display Data RAM)
I2C_WriteByte(Slave_address,OLED_CMD_DISPLAY_RAM);
// Normal mode!
I2C_WriteByte(Slave_address,OLED_CMD_DISPLAY_NORMAL);
// Default oscillator clock
I2C_WriteByte(Slave_address,OLED_CMD_SET_DISPLAY_CLK_DIV);
I2C_WriteByte(Slave_address,0x80);
// Enable the charge pump
I2C_WriteByte(Slave_address,OLED_CMD_SET_CHARGE_PUMP);
I2C_WriteByte(Slave_address,0x14);
// Set precharge cycles to high cap type
I2C_WriteByte(Slave_address,OLED_CMD_SET_PRECHARGE);
I2C_WriteByte(Slave_address,0x22);
// Set the V_COMH deselect volatage to max
I2C_WriteByte(Slave_address,OLED_CMD_SET_VCOMH_DESELCT);
I2C_WriteByte(Slave_address,0x30);
// Horizonatal addressing mode - same as the KS108 GLCD
I2C_WriteByte(Slave_address,OLED_CMD_SET_MEMORY_ADDR_MODE);
I2C_WriteByte(Slave_address,0x00);
// Turn the Display ON
I2C_WriteByte(Slave_address,OLED_CMD_DISPLAY_ON);
}
void I2CA_Init()
{
I2caRegs.I2CMDR.all = 0x0000;
I2caRegs.I2CPSC.all = 8; // Prescaler - need 7-12 Mhz on module clk
I2caRegs.I2CCLKL = 10; // NOTE: must be non zero
I2caRegs.I2CCLKH = 5; // NOTE: must be non zero
//I2caRegs.I2CIER.all = 0x24; // Enable SCD & ARDY interrupts 0010 0100
I2caRegs.I2CIER.bit.AAS = 0; // Addressed as slave interrupt enable bit
I2caRegs.I2CIER.bit.SCD = 1; // Stop condition detected interrupt enable bit
I2caRegs.I2CIER.bit.XRDY = 1; // Transmit-data-ready interrupt enable bit
I2caRegs.I2CIER.bit.XRDY = 1; // Receive-data-ready interrupt enable bit
I2caRegs.I2CIER.bit.ARDY = 1; // Register-access-ready interrupt enable bit
I2caRegs.I2CIER.bit.NACK = 0; // No-acknowledgment interrupt enable bit
I2caRegs.I2CIER.bit.ARBL = 0; // Arbitration-lost interrupt enable bit
//I2caRegs.I2CMDR.all = 0x0020; // Take I2C out of reset,Stop I2C when suspended
I2caRegs.I2CMDR.bit.NACKMOD = 0; // NACK mode bit
I2caRegs.I2CMDR.bit.FREE = 0; // Stop I2C when suspended
I2caRegs.I2CMDR.bit.STT = 0; // START condition bit
I2caRegs.I2CMDR.bit.STP = 0; // STOP condition bit
I2caRegs.I2CMDR.bit.MST = 1; // Slave mode
I2caRegs.I2CMDR.bit.TRX = 1; // Receiver mode
I2caRegs.I2CMDR.bit.XA = 0; // 7-bit addressing mode
I2caRegs.I2CMDR.bit.RM = 0; // Nonrepeat mode
I2caRegs.I2CMDR.bit.DLB = 0; // Digital loopback mode is disabled
I2caRegs.I2CMDR.bit.IRS = 1; // The I2C module is enabled
I2caRegs.I2CMDR.bit.STB = 0; // The I2C module is not in the START byte mode
I2caRegs.I2CMDR.bit.FDF = 0; // Free data format mode is disabled
I2caRegs.I2CMDR.bit.BC = 0; // 8 bits per data byte
// FIFO not used
return;
}
void i2c_a_gpio_init (void)
{
EALLOW;
// Set qualification for the selected I2C pins
GpioCtrlRegs.GPBQSEL1.bit.GPIO42 = 3;
GpioCtrlRegs.GPBQSEL1.bit.GPIO43 = 3;
GpioCtrlRegs.GPBDIR.bit.GPIO43 = 1;
// Configure which of the possible GPIO pins will be I2C_A pins
// using GPIO registers
GpioCtrlRegs.GPBMUX1.bit.GPIO42 = 6;
GpioCtrlRegs.GPBMUX1.bit.GPIO43= 6;
GpioCtrlRegs.GPBPUD.bit.GPIO43=0;
GpioCtrlRegs.GPBPUD.bit.GPIO42=0;
//GPIO_SetupPinMux(42, GPIO_MUX_CPU1,6);
//GPIO_SetupPinMux(43, GPIO_MUX_CPU1,6);
EDIS;
}