Part Number: TMS320F28379D
Other Parts Discussed in Thread: CONTROLSUITE
Tool/software: Code Composer Studio
Hi,
i´m having problem with combining the EtherCat Slave ET1100 with the dual core application.
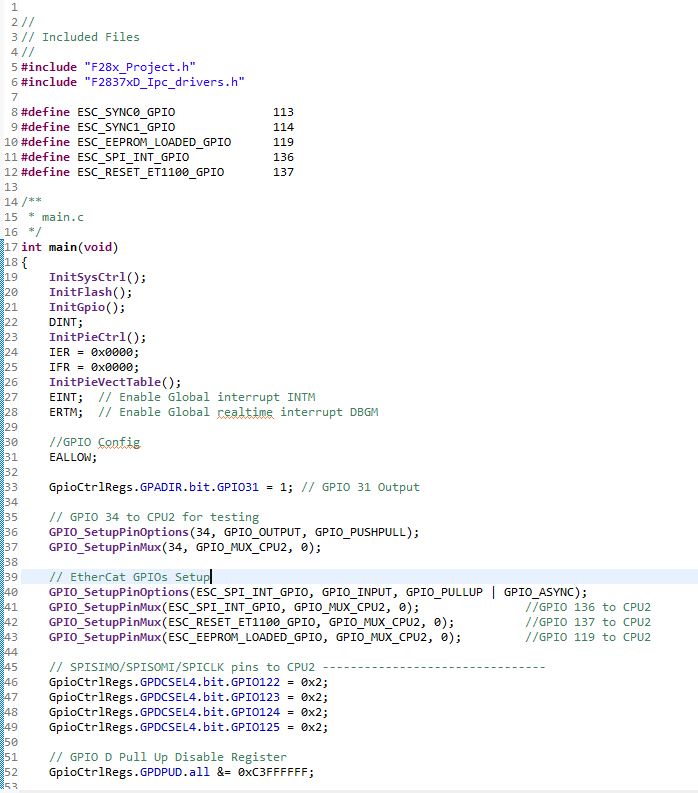
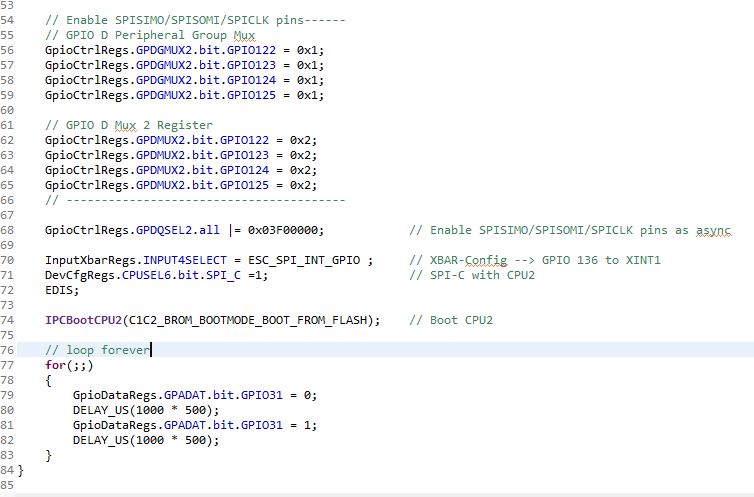
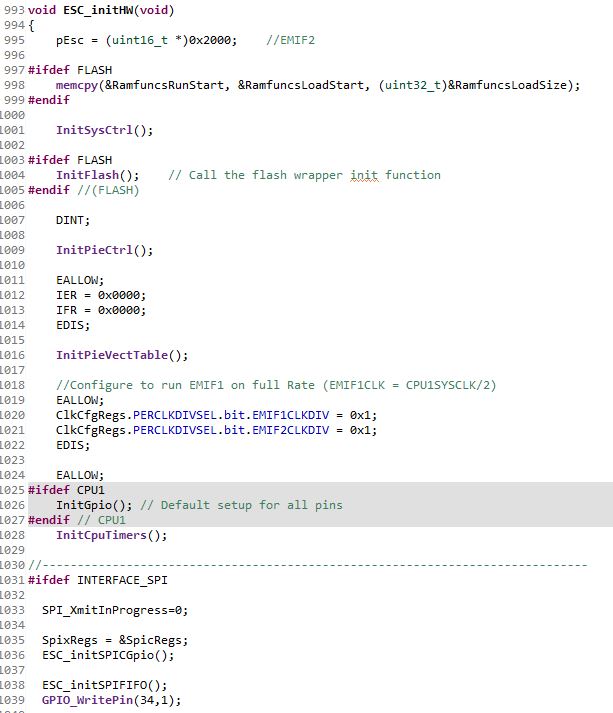
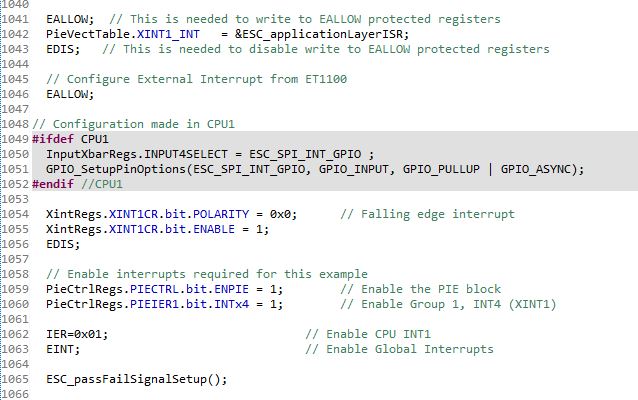
I have an application in which the main programm runs successfully on CPU1 and the EtherCat programm, created from SSC, should run on CPU2. Both programm will be programmed in FLASH and use the *** interface.
I have already tested the blinky demo and it worked on both CPUs.
Now i tried to set the configuration like in the application demo for the etherCat Slave, but modified the command linker file to cpu2 and changed the predefined symbols:
- General:

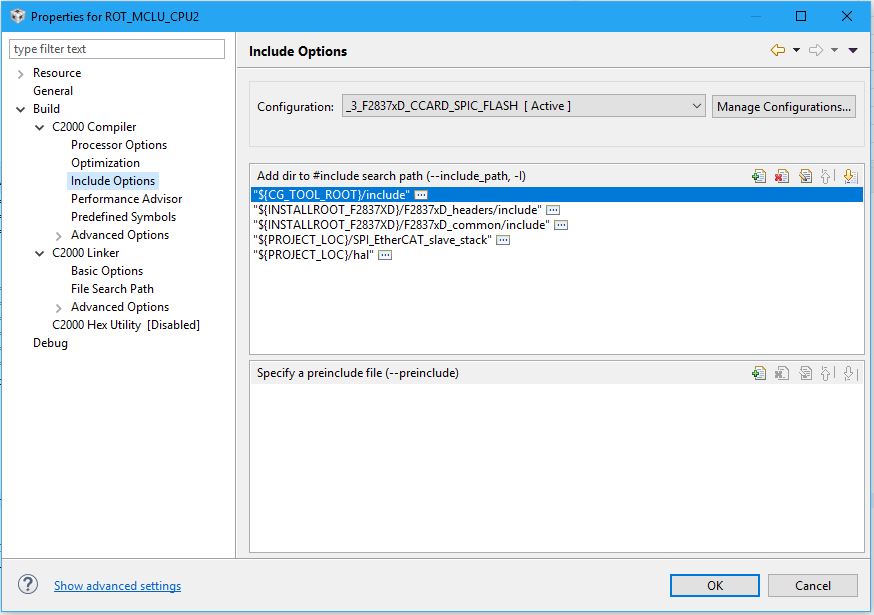
- Include Options:
- Predefined symbols :

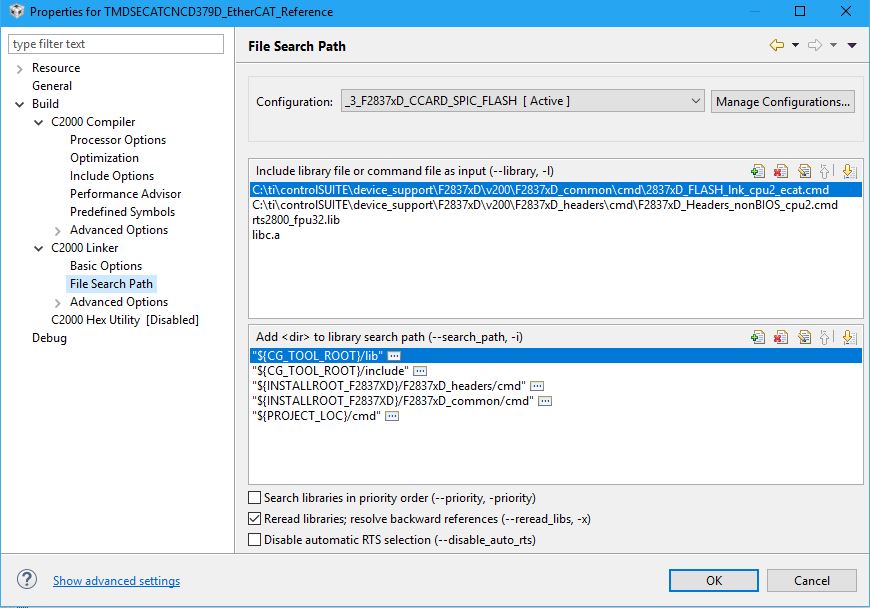
- File Search Path:

with this configuration i get the following errors:
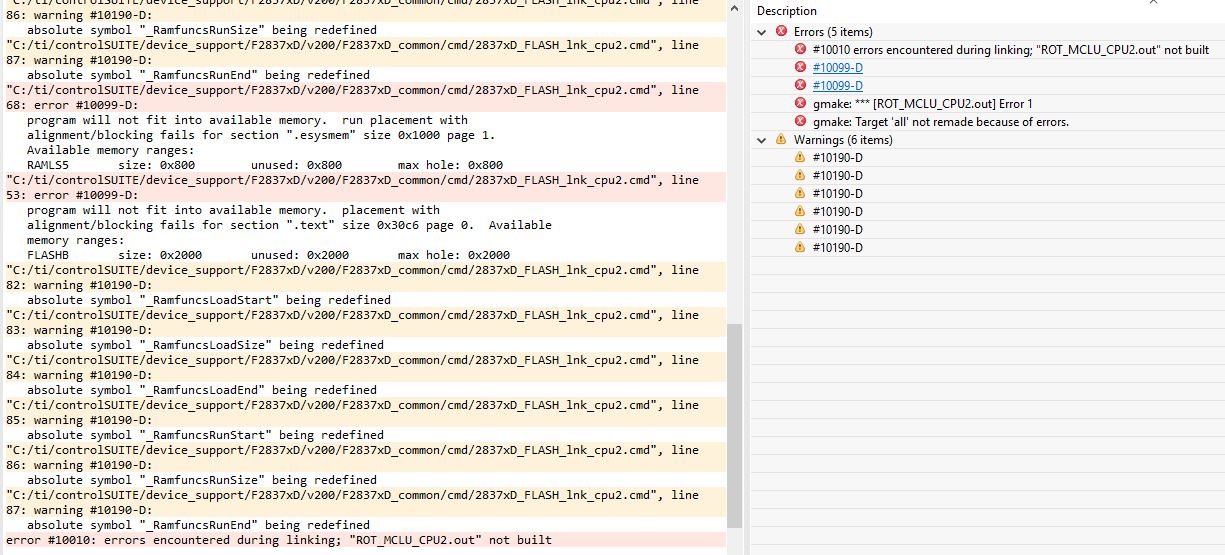
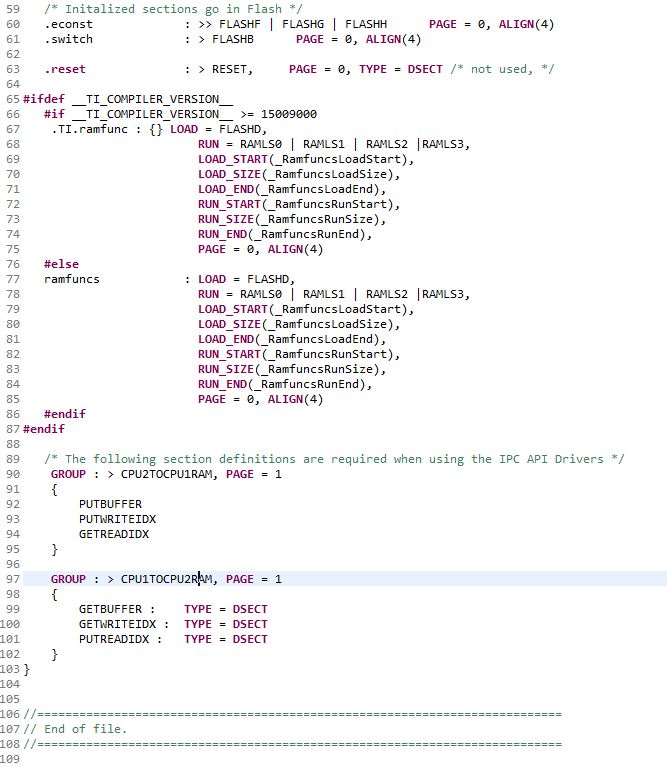
So for me it seems like the command linker file isn´t the right one if using the EtherCat programm on CPU2. With the command linker file for CPU1 its working fine. In this case the command linker file for cpu1 was in the demo application kit, maybe already modified for this case?
Do i have to modify the command linker file for cpu2 too?
With best regards
Willi Konrad