Hello. I want to use the assembly function DCL_PI_A1.asm from C2000Ware. It is a function for PI control which can be used for fixed point processors like TMS320F28035. I can't find any example projects where this function is used, and I am not sure of how to use it. Could anyone give some guidelines?
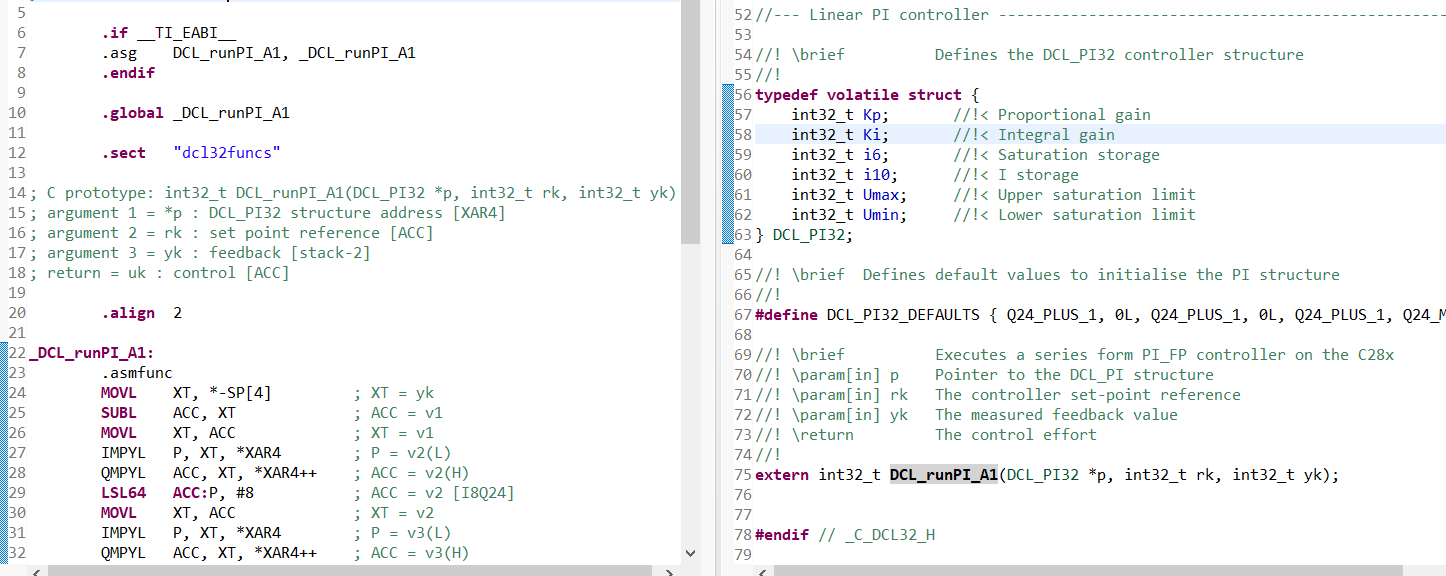
The assembly function code and the DCL32.h header file can be seen in the figure below. Before calling the assembly function, do I need to put *p in XAR4, rk in ACC and yk in [stack-2] by myself? Or is that done somewhere else? What other things do I need to do? I have read the DCL User's Guide PDF but it doesn't give very much information on exactly how to use the functions.