Hi Champs,
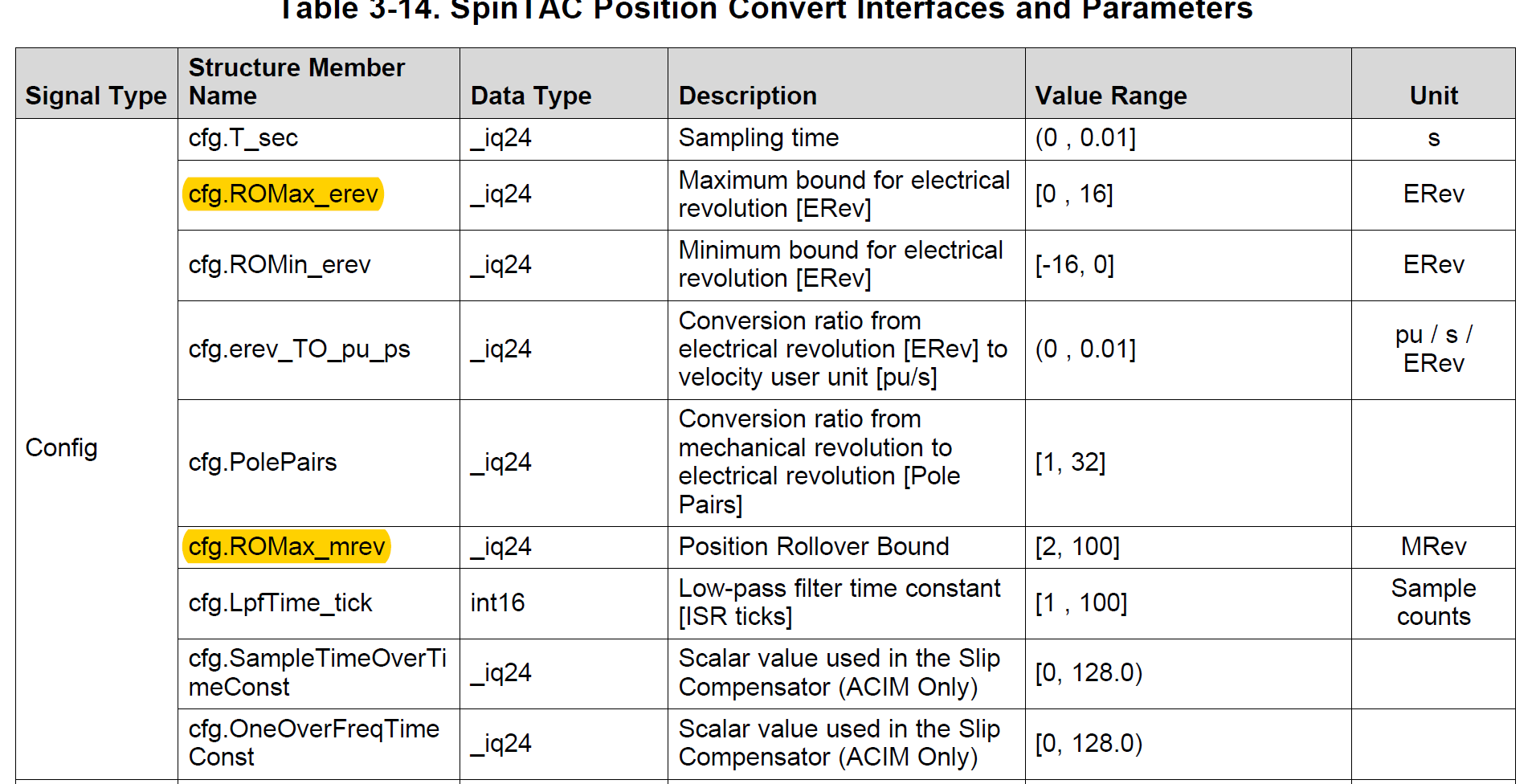
My customer asked about STPOSCTL_setPositionReference_mrev(ST_POSCTL_Handle handle, _iq24 posRef) usage. I checked it's definition and found posRef range is between [-ROMax, ROMax]. I tried to find ROMax definition but I can't find it. I checked TRM and table 3-14 show cfg structure. However, it didn't show ROMax variable. I also search whole motoware and I didn't find any ROMax definition. I guess ROMax value is same as cfg.ROMax_erev. But I am nor sure. Could anyone help me to check where is ROMax value define ? thanks