Part Number: TMS320F28377S
Other Parts Discussed in Thread: C2000WARE
Could somebody please explain the difference between Loopback mode and External Loopback mode in TMS320F28377S? I am confused about whether the module will be sending bits out to the transceiver(I am using Launchpad so transceiver is available) in Loopback mode and External Loopback mode.
The reference manual says, in Loopback mode:
"Transmitted messages still can be monitored at the CAN_TXpin.
In order to be independent from external stimulation, the CAN core ignores acknowledge errors (recessive
bit sampled in the acknowledge slot of a data/remote frame) in loopback mode.
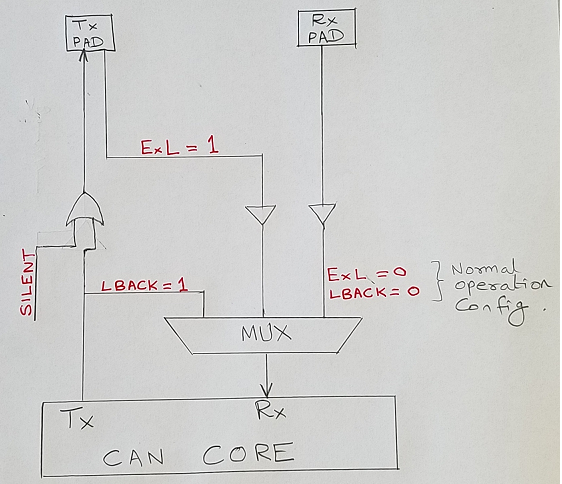
NOTE: In loopback mode, the signal path from CAN core to Tx pin, the Tx pin itself, and the signal
path from Tx pin back to CAN Core are disregarded."
In External Loopback mode:
"it includes the signal path from CAN Core to Tx pin, the Tx pin itself, and the signal path from Tx pin back to the CAN Core. When theexternal loopback mode is selected, the CAN core is connected to the input buffer of the Tx pin. With this
configuration, the Tx pin IO circuit can be tested."
My doubts are:
1) Does this mean that in Loopback mode, bits are not sent out to transceiver(and eventually to bus)? If so, how messages are being monitored as said in the reference manual? How acknowledge error occur if we are not receiving actual receiver value?
2) About External Loopback, what is that "signal path from core to tx pin, tx pin itself and back from tx pin to core"? is that the path used to monitor bit error? And in this case, is the module sending messages out to transceiver?
Since I am a beginner in CAN, I am getting confused with several statements in the reference manual and finding it difficult to pictorise the whole working.