Dear Champs,
I asked about this question is because my background is firmware/software design, and not good at hardware design.
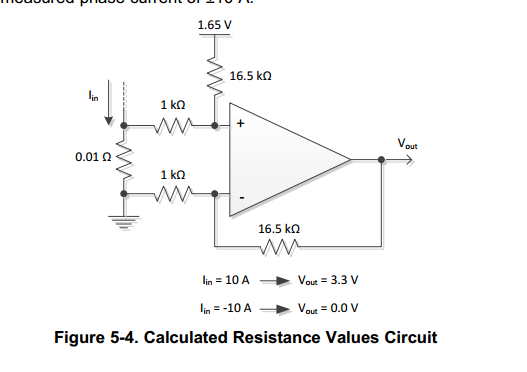
The instaspin-foc&motion user guide mentioned about positive/negative current feedback, it has relationship that 3.3V --> 10A, 0V--> -10A, and the equation is vout = 1.65 + 16.5*0.01*I . What I understand about this circuit is that higher current will have higher volts on ADC pin(larger adc result), and vise versa.
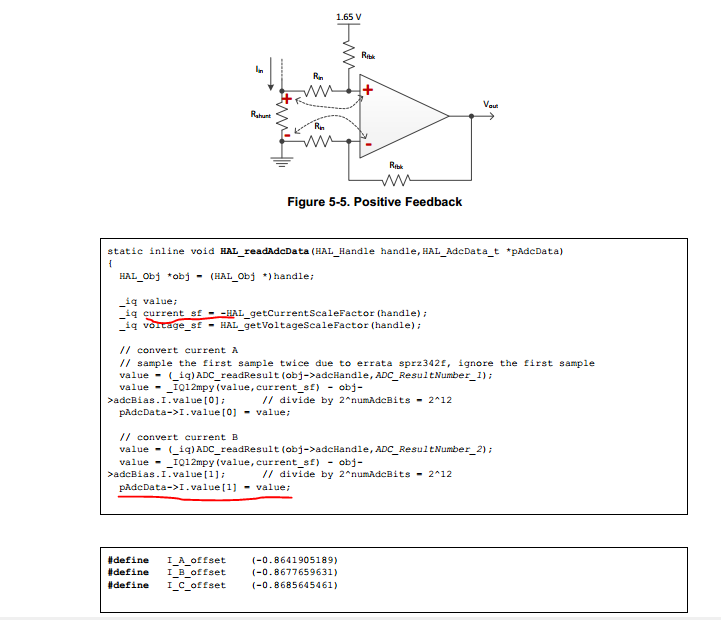
But the below code for this positive feedback shows offset and current_sf are negative. That means the value of pAdcData->I.value[1] is negative when the current is 10A, so I'm confused about this, can you please help to give more detail explanation?