Hi,
Any updates on MTPA strategy?
I would like to know the best MTPA strategy to go forward with as of now:
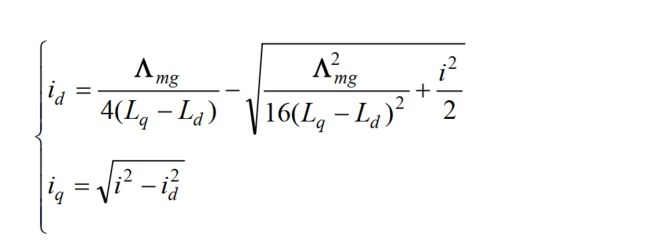
1. MTPA with exact mathematical equations
2. MTPA with lookup tables.
3. No MTPA at all considering Ld and Lq change with respect to current and final MTPA angle is near 90 degrees.
4. Or any other suggestions?