


Part Number: TMS320F28335
Tool/software: Code Composer Studio
Hello everybody
I work with a TMS320F28335 DSP board and CCS 3.3. I read 16 ADCs and transfer data to Matlab GUI and Simulink 2012a in order to be analyzed. The problem is that it seems the ADC sample time is not sufficient or it didn't set properly.
The following picture shows ADC0 that had to be a sinusoidal waveform. The second picture shows settings in Matlab/Simulink. When I had only one ADC the data were more smooth and more similar to a sinusoidal waveform.

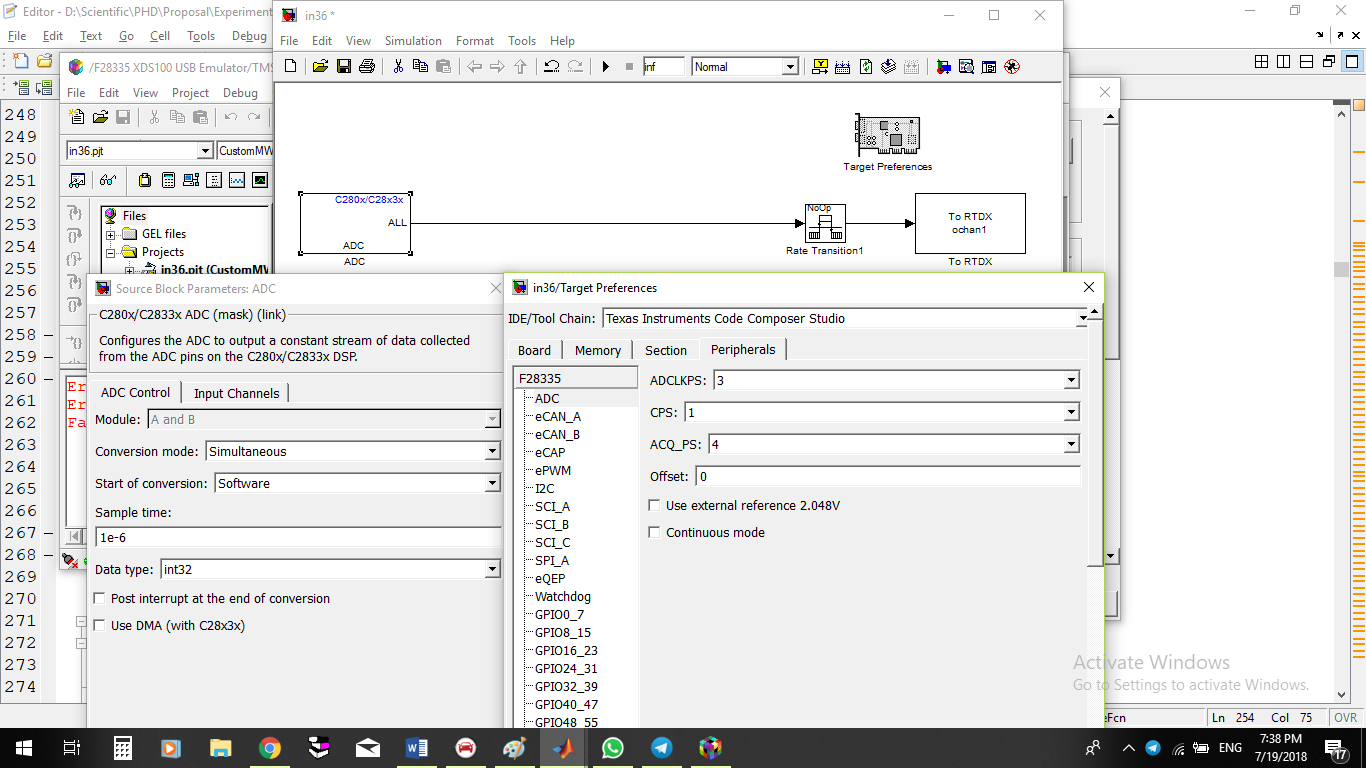
I'll appreciate if someone guides me on how can I have a more smooth waveform.
Best Regards,
Abolfazl


