Part Number: TMS320F28035
Other Parts Discussed in Thread: C2000WARE
Hello,
I am developing a Battery Management System using TMS320F28035 as microcontroller and the combo bq7694000DBT + BQ78350DBTR-R1. We have already developed a BMS version employing MSP430, and it works fine, thanks to all examples and experts which answered all our questions.
After testing CAN bus network, at this point of the project the next step is to develop an I2C interface. For this task, I am taking the example "Example_2803xI2C_eeprom.c" and some information at this thread (https://e2e.ti.com/support/microcontrollers/c2000/f/171/t/303750?tisearch=e2e-quicksearch&keymatch=i2c%20read#pi316717=3) as resource of information.
We divided the test into three steps:
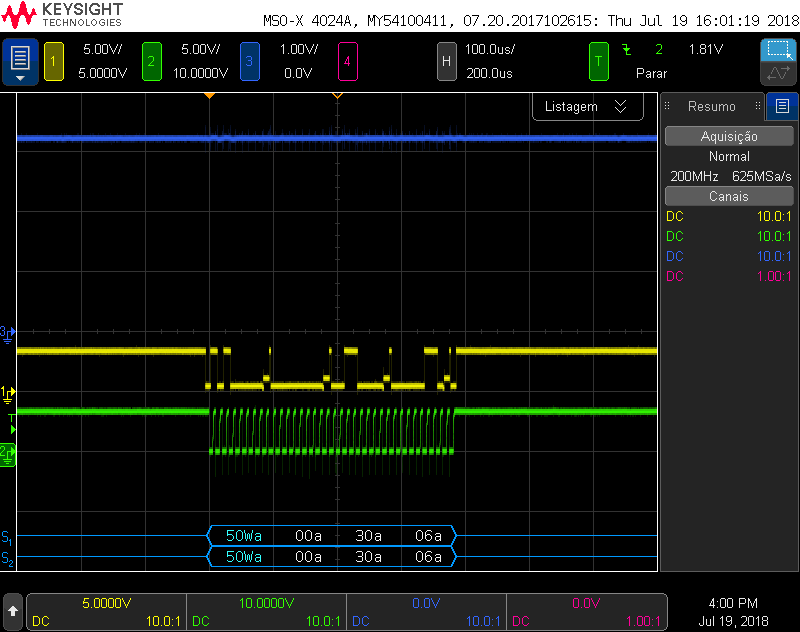
1-) Write operation to a EEPROM 24LC32AT-I/SN from Microchip (figure below). It seems it is working properly as I can write multiple times.
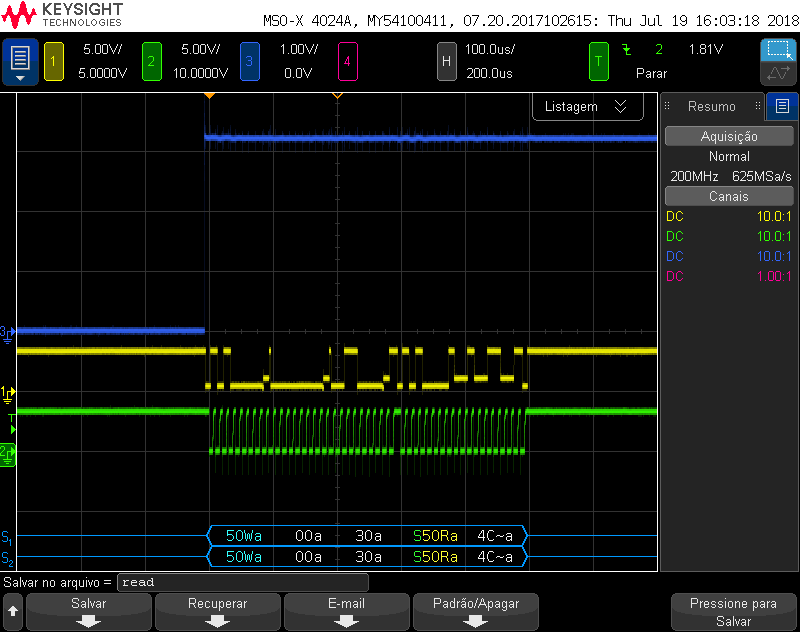
2-) Read operation to the same EEPROM memory. It seems it is working properly as well. The retrieved data is different because it is a counter.
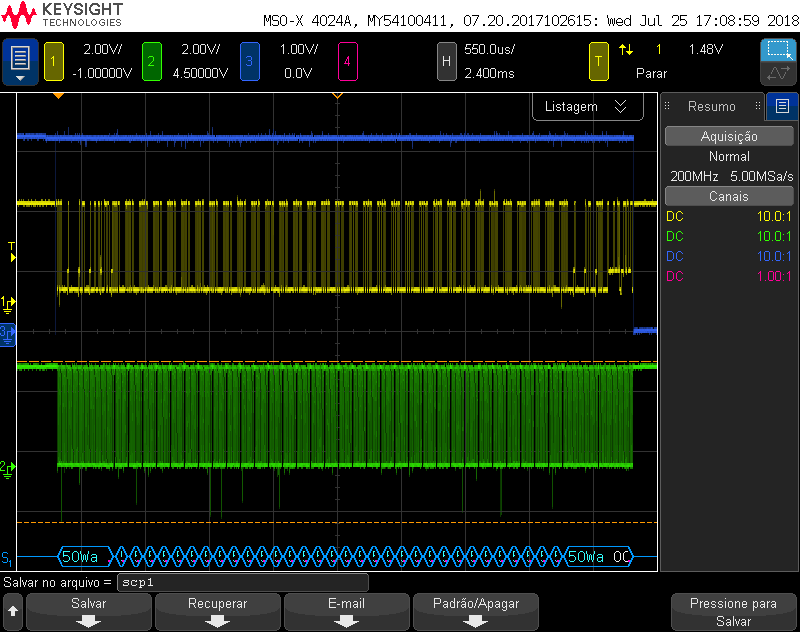
3-) Write and read operation after writing. At this point the issues arise. I cannot be able to write and read, because it seems the programm is stuck at read function. I have already read I2C registers documentation and examples stated above, as well , and I was not able to find the issue. It seems I did not clear some flag or something like that.
I have attached the code. Please, could someone help on this issue?
Thank you in advance.