Part Number: TMS320F28379D
Other Parts Discussed in Thread: C2000WARE
I am working with Launchpad XL TMS320F28379D, trying to get the CAN communication up & running using Bus Master PC tool(Peak driver installed). I have written a basic code similar to CAN examples & CAN provided driver files. The code sets up Message object 1 as Tx & Message Object 2 as Rx.
Trying to Transmit a message periodic 5 seconds. In interrupt handler, check if transmit interrupt is generated & receive interrupt is generated.
Tried with below 3 options in CAN_selectClockSource(CANA_BASE, X)
X = CAN_CLOCK_SOURCE_SYS, CAN_CLOCK_SOURCE_XTAL, CAN_CLOCK_SOURCE_AUX
After this using CAN_setBitRate(CANA_BASE, DEVICE_SYSCLK_FREQ, 500000, 16);
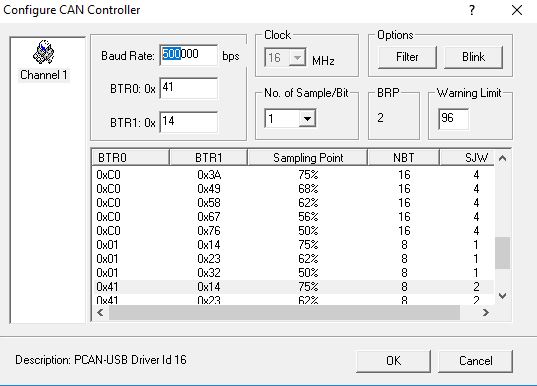
Not seeing any CAN messages on the BusMaster tool - Channel 1 Configured for 500kbps. Can you please tell me how to debug ? Thanks.