



Other Parts Discussed in Thread: C2000WARE
Hello Experts,
I am testing below sample code.
C:\ti\c2000\C2000Ware_1_00_05_00\device_support\f2837xd\examples\cpu1\hrpwm_deadband_sfo_v8\cpu01\hrpwm_deadband_sfo_v8.c
Since this is the code for F2837x, I modified below function for F280049.
InitEPwm1Gpio();
InitEPwm2Gpio();
Now below are pictures for PWM1A and PWM2A. In conjunction with period sweep, the phase between PWM1 and PWM2 are changing.

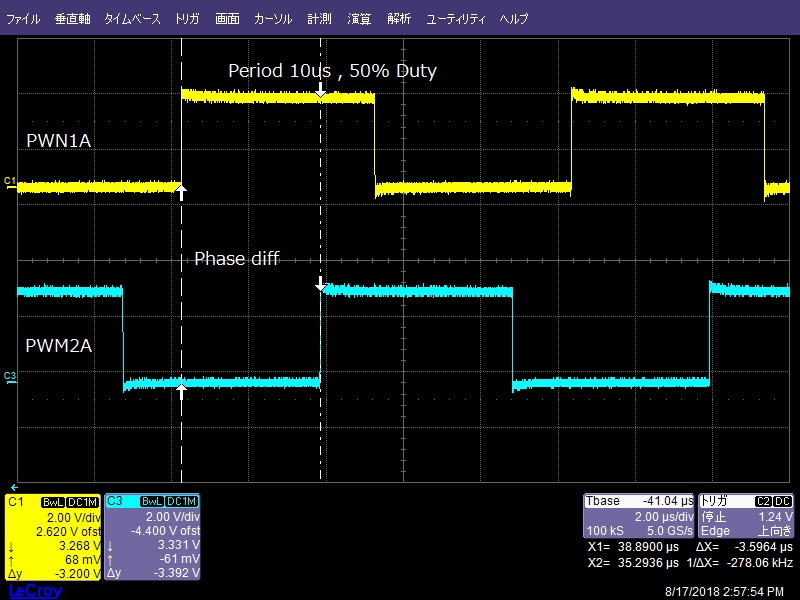
It looks like that the source code sets the updated phase is always a half of the new period but does not look like it. If setting InputPeriodInc parameter to zero, the phase is fixed. I'd like to fix the phase like 120 degree even when the period is changed.
Is this behavior expected? Or do I miss something?
Regards,
Uchikoshi
