Part Number: TMDSSOLARUINVKIT
Hi Manish,
I've got the reference simulations working that are detailed in the sprabt4a.pdf and I've even managed to get breadboard setup running and tracking phases etc.
I've been looking to increase the 'grid frequency' range by a factor of 10 or more with the idea of adapting the code to monitor some small motors etc.
I've adjusted the LPF cutoff to maintain the 1/sqrt(2) (or lower) and adjusted the PI Gains B0 and B1 using the spll_coeff_compute.xlsx as a guide. After quite a few iterations and adjustments, It seems that I hit a maximum grid frequency of around 500Hz before I can no longer get the PLL to lock.
I've tried to see if switching frequency in the matlab model has an impact by simply scaling it up by a factor of 10 from 10kHz and that doesn't seem to help much.
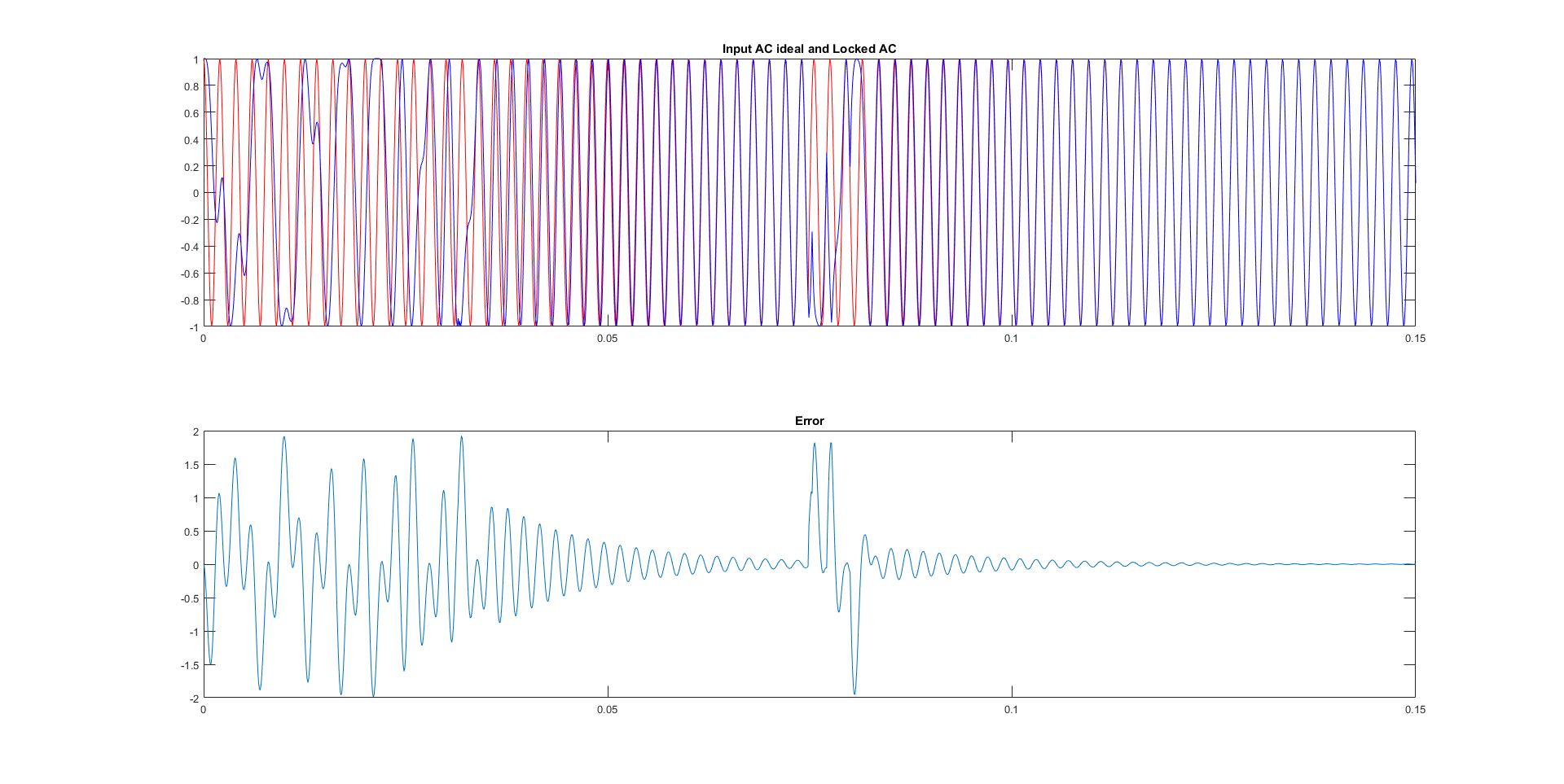
The picture below shows the error plot at 500Hz, a settling time of 0.025 seconds (B0 = 268.4, B1 = 264.8), LPF coeffs K1 = 0.0715 K2 = -0.8571, Fs= 10kHz
It's clear the PLL doesn't settle within the 25ms so I suspect even at 500Hz it's barely stable.
Do you have any comments or suggestions on the upper frequency limit of the algorithm?
Also for an application where I want to accurately monitor the motor phases, the motors can vary quite a bit in operating frequency so I suspect there's a maximum usable frequency range for the algorithm?
Thanks,
James