
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hi,
I have the following Bourns encoder

connected to the launchpad GPIO24, GPIO25 as per the following schematic:

I am using the following code to read the encoder position:
// Encoder is connected to QEP_B
// ENC_A is connected to EQEP2A (GPIO24)
// ENC_B is connected to EQEP2B (GPIO25)
void init_eqep2_gpio(void)
{
EALLOW;
// Enable internal pull-up for the selected pins
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
GpioCtrlRegs.GPAPUD.bit.GPIO24 = 1; // Disable pull-up on GPIO24 (EQEP2A)
GpioCtrlRegs.GPAPUD.bit.GPIO25 = 1; // Disable pull-up on GPIO25 (EQEP2B)
GpioCtrlRegs.GPAPUD.bit.GPIO26 = 1; // Disable pull-up on GPIO26 (EQEP2I)
GpioCtrlRegs.GPAPUD.bit.GPIO27 = 1; // Disable pull-up on GPIO27 (EQEP2S)
// Inputs are synchronized to SYSCLKOUT by default.
GpioCtrlRegs.GPAQSEL2.bit.GPIO24 = 0; // Sync to SYSCLKOUT GPIO24 (EQEP2A)
GpioCtrlRegs.GPAQSEL2.bit.GPIO25 = 0; // Sync to SYSCLKOUT GPIO25 (EQEP2B)
GpioCtrlRegs.GPAQSEL2.bit.GPIO26 = 0; // Sync to SYSCLKOUT GPIO26 (EQEP2I)
GpioCtrlRegs.GPAQSEL2.bit.GPIO27 = 0; // Sync to SYSCLKOUT GPIO27 (EQEP2S)
// Configure eQEP-1 pins using GPIO regs
// This specifies which of the possible GPIO pins will be eQEP1 functional
// pins.
GpioCtrlRegs.GPAMUX2.bit.GPIO24 = 2; // Configure GPIO24 as EQEP2A
GpioCtrlRegs.GPAMUX2.bit.GPIO25 = 2; // Configure GPIO25 as EQEP2B
GpioCtrlRegs.GPAMUX2.bit.GPIO26 = 2; // Configure GPIO26 as EQEP2I
GpioCtrlRegs.GPAMUX2.bit.GPIO27 = 2; // Configure GPIO27 as EQEP2S
EDIS;
}
void init_qcap(void)
{
EQep2Regs.QUPRD = 800000; // Unit Timer for 100Hz at 80 MHz SYSCLKOUT
EQep2Regs.QDECCTL.bit.QSRC = 0; // QEP quadrature count mode
// EQep2Regs.QDECCTL.bit.SOEN = 1; // Enable position compare
EQep2Regs.QEPCTL.bit.FREE_SOFT = 2;
EQep2Regs.QEPCTL.bit.PCRM = 1; // PCRM = 1 mode - QPOSCNT reset on max position
EQep2Regs.QPOSMAX = 0x32; // max value is 50
EQep2Regs.QEPCTL.bit.QPEN = 1; // QEP enable
EQep2Regs.QCAPCTL.bit.UPPS = 5; // 1/32 for unit position
EQep2Regs.QCAPCTL.bit.CCPS = 6; // 1/64 for CAP clock
EQep2Regs.QCAPCTL.bit.CEN = 1; // QEP Capture Enable
}
void main(void)
{
uint16_t i = 0, r = 0, pos;
InitSysCtrl();
init_mcbspa_gpio(); /* setup gpio for mcbspa/spi */
init_eqep2_gpio(); /* setup gpio for encoder */
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
EALLOW;
PieVectTable.DINTCH1 = &isr_dma_ch1; /* Tx ISR DMA CH1 INT7.1 */
EDIS;
init_qcap();
dma_init(); /* dma initialization alone */
setup_lcd_pins(); /* setup LCD RESET, D/C pins */
ssd1306_reset(); /* Reset LCD */
PieCtrlRegs.PIECTRL.bit.ENPIE = 1; /* Enable PIE block */
PieCtrlRegs.PIEIER7.bit.INTx1 = 1; /* Enable PIE Group 7 INT1(DMA CH1) */
IER = 0x40; /* Enable CPU INT Group 7 */
EINT; /* Enable Global Interrupts */
while (1) {
pos = (int) EQep2Regs.QPOSCNT;
rad_graph(pos);
DELAY_US(2000);
}
}
I do see values being changed in the QPOSCNT register as can be seen in the debugger view.

I have a LCD also connected to the McBSP peripheral, which displays the QPOSCNT value.
The value I can see changing on the display as well, but the values seem to jump around with no relation eg: rotating the encoder the jump seem to be with much large values for a single turn of the encoder. Wondering how to address the issue ?
Is the issue addressable with the UPPS and the CCPS bits in the QCAPCTL register ?
ie :
EQep2Regs.QCAPCTL.bit.UPPS = 5; // 1/32 for unit position
EQep2Regs.QCAPCTL.bit.CCPS = 6; // 1/64 for CAP clock
GPIO24 and GPIO25 are configured for the encoder alone and nothing else.
I have a scope connected to GPIO25, I see a waveform on the pin, even when the encoder is not being turned, as seen in the picture:
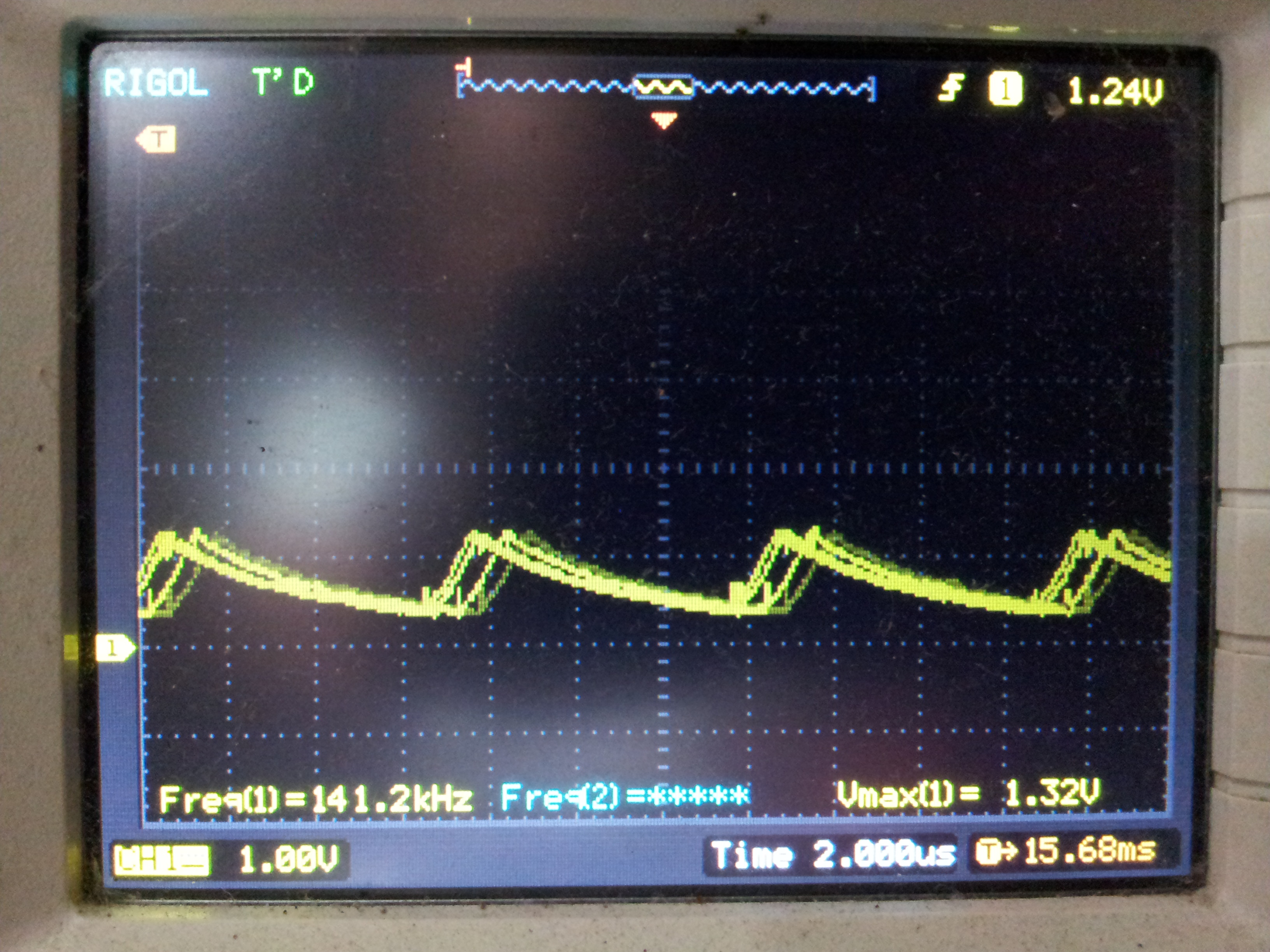
confused on the situation and hence my questions:
1. I am confused why the QPOSCNT value jumps around ? Is it probably due to the timer being configured incorrectly ?
2. Why is there a signal being generated by the controlled on the encoder input line ?
Any thoughts ?
Thanks,
Manu










