Other Parts Discussed in Thread: TMS570LS3137, C2000WARE
Tool/software: Code Composer Studio
Hi everyone,
This question of mine is related to the question I asked this month. My problem is this:
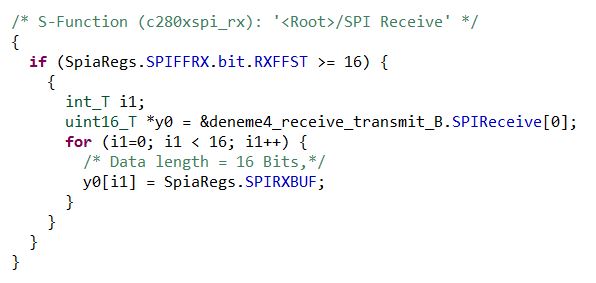
For instance, I send 3x1 uint16 vector from Arduino(Master) to TMS320F2808(Slave) and there is nothing wrong with the receive of data since at SPIRXBUF I see the correct data but since I use FIFO, the RXFFOVF bit is always 1, which means that more than 16 words is received by the FIFO even if I send less than 3 words continuously. Furthermore, I simply multiply this 3x1 vector by a constant on the slave side and send it back to the master. There is this second problem: Even if I send 3 words to the master, at FIFO buffer I see that transmit FIFO contains 16 words and 13 words respectively and repeatedly. I do not know why this happens. I am open to any help.
Thanks.