Tool/software: Code Composer Studio
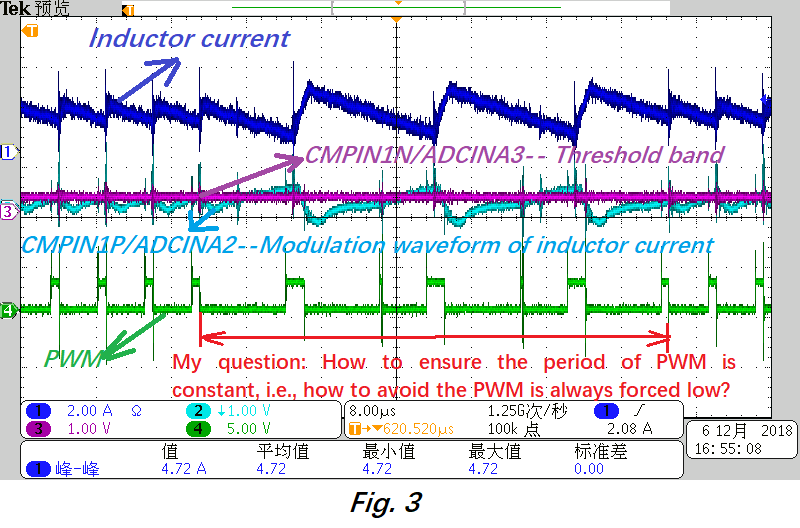
I want to use the CMPSS to realize the peak current mode control of buck converter. Therefore, I write some code to test the CMPSS and ePWM. The test waveforms are as follows, where the light-blue line represents the signal connected in CMPIN1P/ADCINA2 and the pink line represents the signal connected in CMPIN1N/ADCINA3. The green line is the output signal (ePWM6A).

In the code, I set the default duty cycle is 50%, and it is forced to low when the CMPSS trip event occurs. Fig 1 gives the waveforms that the CMPSS is worked and it can force PWM to low. However, according to Fig. 2, when CMPIN1P > CMPIN1N, ePWM is always low, this is not that I want. I hope during the period that CMPIN1P > CMPIN1N, the PWM always has output the duty cycle that I set (50% and not always low). The code are listed as follows, how should I set the registers? Thank you very much!
void InitEPwm6Example(void)
{
EPwm6Regs.TBPRD = 500; // Set timer period
EPwm6Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm6Regs.TBCTR = 0x0000; // Clear counter
//
// Setup TBCLK
//
EPwm6Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm6Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm6Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // Clock ratio to SYSCLKOUT
EPwm6Regs.TBCTL.bit.CLKDIV = TB_DIV1; // Slow just to observe on
// the scope.
EPwm6Regs.TBCTL.bit.PHSEN = TB_ENABLE; //禁止相位控制
EPwm6Regs.TBCTL.bit.PRDLD = TB_SHADOW; //TBPRD寄存器采用映射模式
EPwm6Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; //禁止同步信号
// Setup compare
//
EPwm6Regs.CMPA.bit.CMPA = 250; //计数到此,强制拉低
//
// Set actions
//
EPwm6Regs.AQCTLA.bit.ZRO = AQ_SET; //在计数为0处,设置EPWMA为高电平
EPwm6Regs.AQCTLA.bit.CAU = AQ_CLEAR; // 达到设定计数值CMPA处,EPWMA为低电平
///----------------------------------------------------------------------------
EALLOW;
//Configure DCB to be TRIP4
EPwm6Regs.DCTRIPSEL.bit.DCBHCOMPSEL = 3; //选择Zone4 作为触发Trip 4
EPwm6Regs.TZDCSEL.bit.DCBEVT2 = TZ_DCBH_HI; //Digital compare output B event 2 选择
EPwm6Regs.TZSEL.bit.DCBEVT2 = 1;//Configure DCB as CBC
//Configure DCB path to be filtered & async
EPwm6Regs.DCBCTL.bit.EVT2SRCSEL = DC_EVT_FLT; // Source is DCBEVT2 Signa
EPwm6Regs.DCBCTL.bit.EVT2FRCSYNCSEL = DC_EVT_SYNC; // 0: Source Is Synchronous Signal
//空窗设置
EPwm6Regs.DCFCTL.bit.BLANKE=1; //1: Blanking window is enabled
EPwm6Regs.DCFCTL.bit.PULSESEL=2; // Time-base counter equal to zero (TBCTR = 0x00)
EPwm6Regs.DCFCTL.bit.SRCSEL=3; // Source Is DCBEVT2 Signal
EPwm6Regs.DCFOFFSET=0; //Blanking Window Offset
EPwm6Regs.DCFWINDOW=30; //0.1 us 20
EPwmXbarRegs.TRIP4MUXENABLE.bit.MUX0 = 1; //Enable TRIP4 Mux for Output
EPwm6Regs.TZCTL.bit.TZA=TZ_FORCE_LO; // Force EPWMxA to a low state
EPwm6Regs.TZCLR.bit.CBCPULSE=0; //CTR = zero pulse clears CBC trip latch. (Same as legacy designs.)
EPwmXbarRegs.TRIP5MUXENABLE.bit.MUX0 = 1; //Enable TRIP4 Mux for Output
EDIS;
}
void InitCMPSS(void)
{
EALLOW;
//
//Enable CMPSS
//
Cmpss1Regs.COMPCTL.bit.COMPDACE = 1;
//
//NEG signal comes from DAC
//
Cmpss1Regs.COMPCTL.bit.COMPHSOURCE = NEGIN_PIN;
//
//Use VDDA as the reference for DAC
//
Cmpss1Regs.COMPDACCTL.bit.SELREF = REFERENCE_VDDA;
//
//Set DAC to midpoint for arbitrary reference
//
// Cmpss1Regs.DACHVALS.bit.DACVAL = 800;
//
// Configure CTRIPOUT path
// Asynch output feeds CTRIPH and CTRIPOUTH
//
// Cmpss1Regs.COMPCTL.bit.CTRIPHSEL = CTRIP_SYNCH;
// Cmpss1Regs.COMPCTL.bit.CTRIPOUTHSEL = CTRIP_SYNCH;
EDIS;
}