Part Number: TMS320F28379D
Tool/software: Code Composer Studio
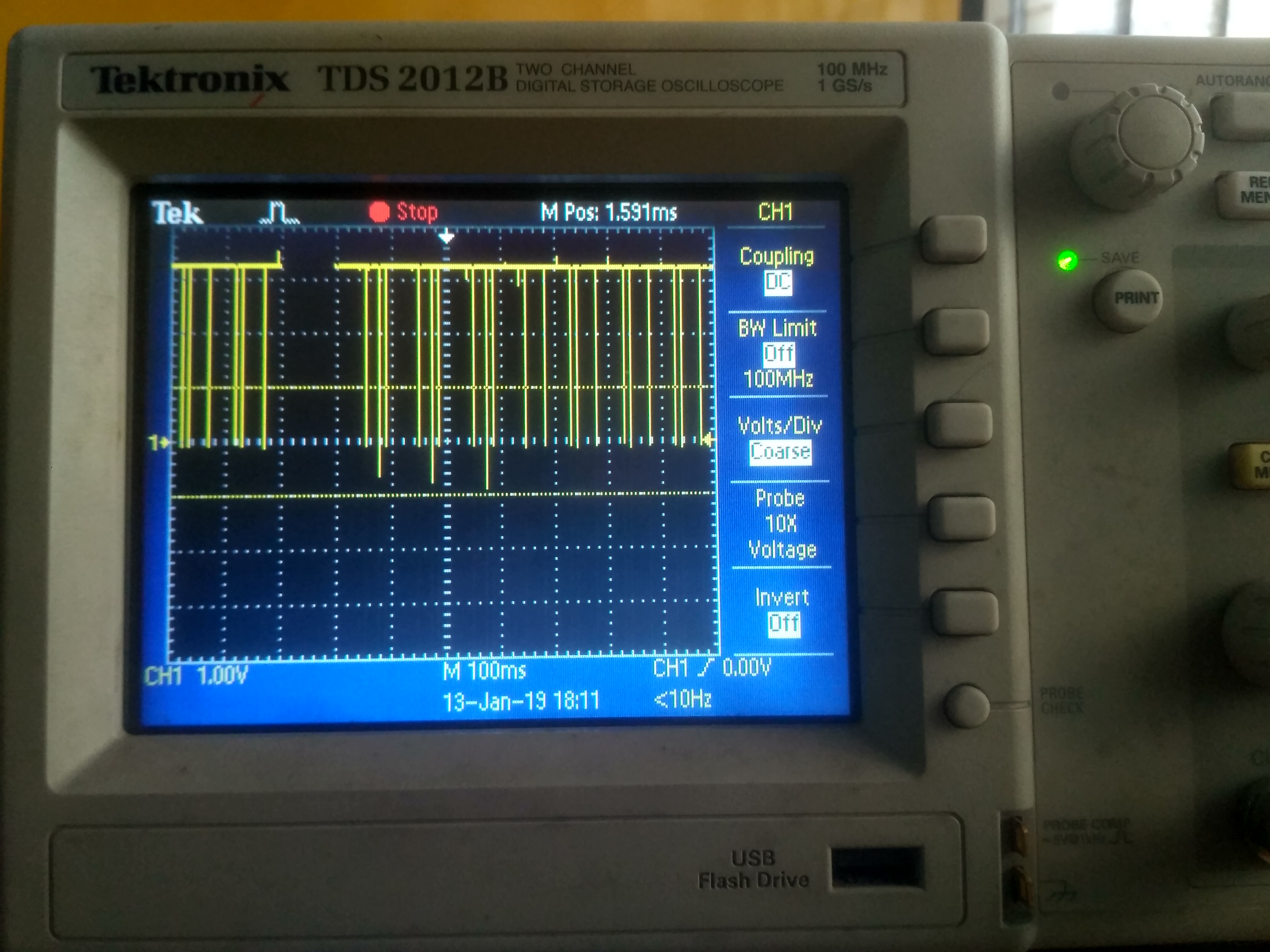
This is a example program in the C2000 examples but I have modified the pin numbers. I am only getting 3.3V constantly but not for some specified period is there any mistake in changing the pins or how the output should be if it is correct please help me.
#include "F28x_Project.h"
//
// Defines
//
#define DELAY (CPU_RATE/1000*6*510) //Qual period at 6 samples
//void delay ();
//
// Globals
//
volatile Uint32 Xint1Count;
volatile Uint32 Xint2Count;
Uint32 LoopCount;
//
// Function Prototypes
//
interrupt void xint1_isr(void);
interrupt void xint2_isr(void);
//
// Main
//
void main(void)
{
Uint32 TempX1Count;
Uint32 TempX2Count;
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xD_SysCtrl.c file.
//
InitSysCtrl();
//
// Step 2. Initialize GPIO:
// This example function is found in the F2837xD_Gpio.c file and
// illustrates how to set the GPIO to its default state.
//
// InitGpio(); // Skipped for this example
//
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
//
DINT;
//
// Initialize PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the F2837xD_PieCtrl.c file.
//
InitPieCtrl();
//
// Disable CPU interrupts and clear all CPU interrupt flags:
//
IER = 0x0000;
IFR = 0x0000;
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xD_DefaultIsr.c.
// This function is found in F2837xD_PieVect.c.
//
InitPieVectTable();
//
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
//
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.XINT1_INT = &xint1_isr;
PieVectTable.XINT2_INT = &xint2_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
//
// Step 4. User specific code, enable interrupts:
//
// Clear the counters
//
Xint1Count = 0; // Count XINT1 interrupts
Xint2Count = 0; // Count XINT2 interrupts
LoopCount = 0; // Count times through idle loop
//
// Enable XINT1 and XINT2 in the PIE: Group 1 interrupt 4 & 5
// Enable INT1 which is connected to WAKEINT:
//
PieCtrlRegs.PIECTRL.bit.ENPIE = 1; // Enable the PIE block
PieCtrlRegs.PIEIER1.bit.INTx4 = 1; // Enable PIE Group 1 INT4
PieCtrlRegs.PIEIER1.bit.INTx5 = 1; // Enable PIE Group 1 INT5
IER |= M_INT1; // Enable CPU INT1
EINT; // Enable Global Interrupts
//
// GPIO30 & GPIO31 are outputs, start GPIO30 high and GPIO31 low
//
EALLOW;
GpioDataRegs.GPASET.bit.GPIO24 = 1; // Load the output latch
GpioCtrlRegs.GPAMUX2.bit.GPIO24 = 0; // GPIO
GpioCtrlRegs.GPADIR.bit.GPIO24 = 1; // output
GpioDataRegs.GPACLEAR.bit.GPIO29 = 1; // Load the output latch
GpioCtrlRegs.GPAMUX2.bit.GPIO29 = 0; // GPIO
GpioCtrlRegs.GPADIR.bit.GPIO29 = 1; // output
EDIS;
//
// GPIO0 and GPIO1 are inputs
//
EALLOW;
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 0; // GPIO
GpioCtrlRegs.GPADIR.bit.GPIO0 = 0; // input
GpioCtrlRegs.GPAQSEL1.bit.GPIO0 = 0; // XINT1 Synch to SYSCLKOUT only
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 0; // GPIO
GpioCtrlRegs.GPADIR.bit.GPIO1 = 0; // input
GpioCtrlRegs.GPAQSEL1.bit.GPIO1 = 2; // XINT2 Qual using 6 samples
GpioCtrlRegs.GPACTRL.bit.QUALPRD0 = 0xFF; // Each sampling window
// is 510*SYSCLKOUT
EDIS;
//
// GPIO0 is XINT1, GPIO1 is XINT2
//
GPIO_SetupXINT1Gpio(0);
GPIO_SetupXINT2Gpio(1);
//
// Configure XINT1
//
XintRegs.XINT1CR.bit.POLARITY = 0; // Falling edge interrupt
XintRegs.XINT2CR.bit.POLARITY = 1; // Rising edge interrupt
//
// Enable XINT1 and XINT2
//
XintRegs.XINT1CR.bit.ENABLE = 1; // Enable XINT1
XintRegs.XINT2CR.bit.ENABLE = 1; // Enable XINT2
//
// GPIO34 will go low inside each interrupt. Monitor this on a scope
//
EALLOW;
GpioCtrlRegs.GPBMUX2.bit.GPIO60 = 0; // GPIO
GpioCtrlRegs.GPBDIR.bit.GPIO60 = 1; // output
EDIS;
//
// Step 5. IDLE loop:
//
for(;;)
{
TempX1Count = Xint1Count;
TempX2Count = Xint2Count;
//
// Trigger both XINT1
//
GpioDataRegs.GPBSET.bit.GPIO60 = 1; // GPIO34 is high
GpioDataRegs.GPACLEAR.bit.GPIO30 = 1; // Lower GPIO30, trigger XINT1
while(Xint1Count == TempX1Count) {}
//
// Trigger both XINT2
//
GpioDataRegs.GPBSET.bit.GPIO60 = 1; // GPIO34 is high
DELAY_US(DELAY); // Wait for Qual period
GpioDataRegs.GPASET.bit.GPIO31 = 1; // Raise GPIO31, trigger XINT2
while(Xint2Count == TempX2Count) {}
//
// Check that the counts were incremented properly and get ready
// to start over.
//
if(Xint1Count == TempX1Count + 1 && Xint2Count == TempX2Count + 1)
{
LoopCount++;
GpioDataRegs.GPASET.bit.GPIO30 = 1; // raise GPIO30
GpioDataRegs.GPACLEAR.bit.GPIO31 = 1; // lower GPIO31
}
else
{
asm(" ESTOP0"); // stop here
}
}
}
//
// xint1_isr - External Interrupt 1 ISR
//
interrupt void xint1_isr(void)
{
GpioDataRegs.GPBCLEAR.all = 0x0000; // GPIO34 is low
Xint1Count++;
//
// Acknowledge this interrupt to get more from group 1
//
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
//
// xint2_isr - External Interrupt 2 ISR
//
interrupt void xint2_isr(void)
{
GpioDataRegs.GPBCLEAR.all = 0x0000; // GPIO34 is low
Xint2Count++;
//
// Acknowledge this interrupt to get more from group 1
//
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}