Other Parts Discussed in Thread: C2000WARE
Hi,
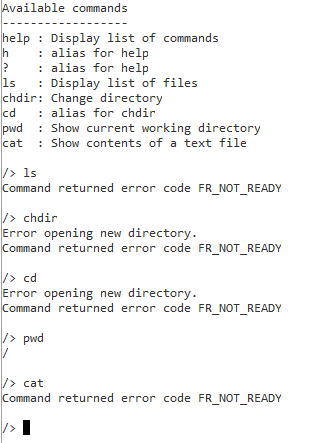
I have been trying to connect sd card to my launchpad for a few days now and I am unable to do anything with thr example code given by TI. First, how do i access UART to test mysd card connection?? Why are the ports given in the code(GPIO 28 and GPIO 29) which are not even accessible on the launchpad? How do i connect my sd card? GPIO 122,123,124 and 125 were declared but no proper explanation to the connections are given. What do i connect it to? The UART printf never works for me. I do not want to use the command line at all. I just want to write a something and save it.
fresult=f_mount(0,&g_sFatFs);
fresult=f_open(&g_sFileObject, "E:/Msg.ext", FA_READ | FA_WRITE );
ReadCount = 512;
fresult=f_write(&g_sFileObject, "1000.00,1001.00,1002.00,1003.00,1004.00,1005.00,1006.00,150,151,152,1,10000,10001,10002,360.1234\n", sizeof("1000.00,1001.00,1002.00,1003.00,1004.00,1005.00,1006.00,150,151,152,1,10000,10001,10002,360.1234\n"), &Count);
f_sync(&g_sFileObject);
fresult=f_close(&g_sFileObject);
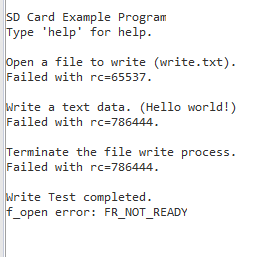
When i try the above code, I get FR_NOT_READY error. I am new to SD CARD and C2000. Please help me with it.