Other Parts Discussed in Thread: CONTROLSUITE
I have just started working on the implementation of motor control, any advice/support is will be very useful to me.
I have written a code for SPWM to run the motor in open loop and controlling it via Scalar Control.
I have configure ePWM4 A/B at 500Hz and Configured eCAP1 (GPIO24 - J6 55) as capture pin.
I am able to achieve the Scalar V/F control of the motor Properly and I am also able to capture the 500 Hz from the ePWM4 at eCAP1.
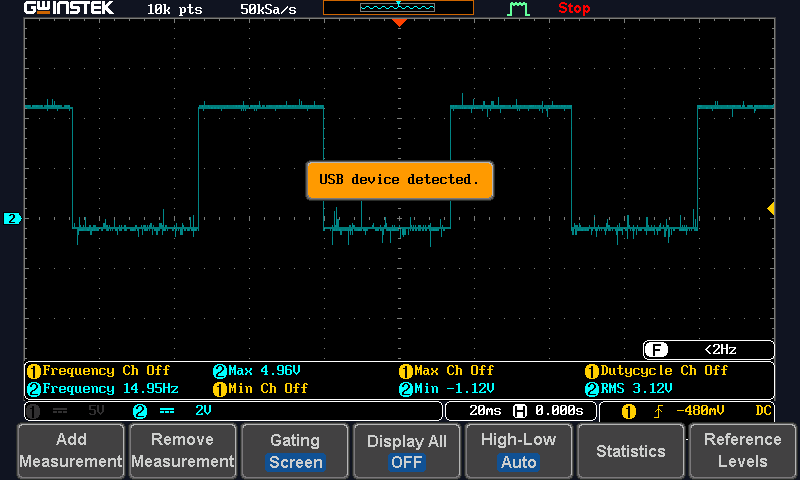
I am able to see the HALL sensor feedback output at the DSO, but when I am trying to capture the Hall feedback frequency and hence Speed, its showing some Random value at the capture.
The wave form of the Hall feedback is attached, To me the reason for failing to read properly is Noise in the Hall feedback waveform, which is leading to false capture of rising and falling edge,
I would like to have Solution/Suggestion about how to tackle this Issue.