Part Number: LAUNCHXL-F28027F
Other Parts Discussed in Thread: DRV8305
Hi,
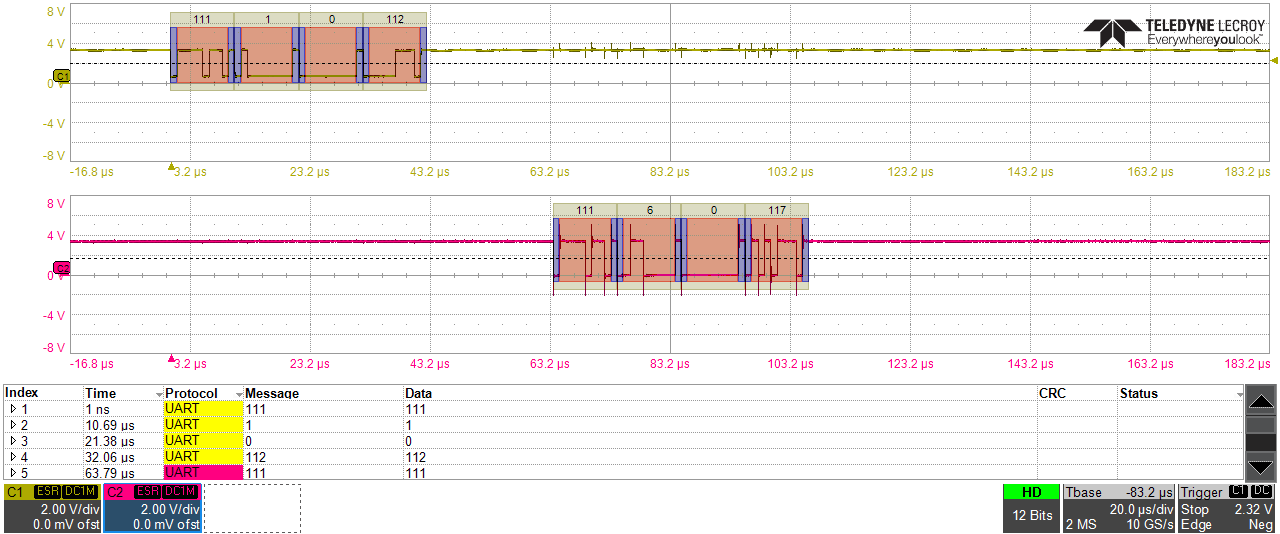
I tired to add a SCI communication to my LaunchXL F28027F and DRV8305.
Everything works till Flag_enableSys gets set. From there on the communication fails and just a few single values are received from time to time.
The SCI is set up like described in the Hal tutorial but for me it seems that there is something wrong with the priority..
Anyone expired the same problem or got a solution for this?
Many thanks in advance.
Br,