


Other Parts Discussed in Thread: MOTORWARE
Hello,
I'm working on Inertia wheel inverted pendulum project. I'm trying to stabilize that pendulum by changes of torque on motor with inertia wheel on shaft.
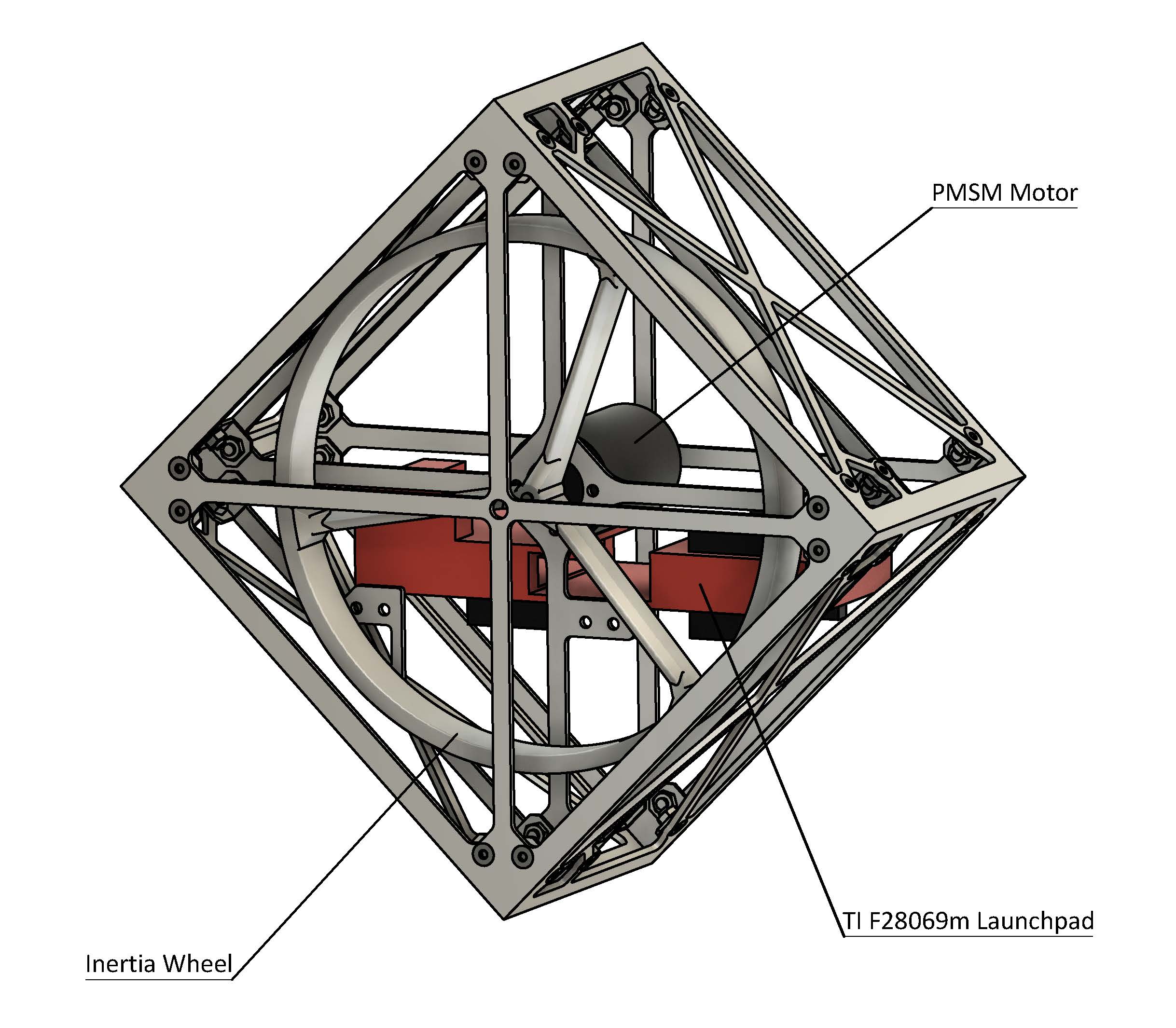
I use lab 12b becouse i need feedback from encoder in my project. Angular position of whole construction is given by gyro sensor.
The goal of the project is to keep the contruction balancing on its edge. There is LQR controller, which calculate torque of wheel.
The problem is: LQR controller changes torque sign very quickly, and system needs that rapid changes to remain stability, but motorware software does not change direction of torque so quickly.
To control torque I disable velocity controller:
STVELCTL_setEnable(stObj->velCtlHandle, false);
and directly set torque, by q-axis current:
CTRL_setIq_ref_pu(ctrlHandle, Iq_ref_threshold);
But when I enable motor, it looks like there is a large delay beetween moment when Iq_ref_threshold changes sign and moment when motor changes direction of torque. (about 1 second)
Is it possible to make it changing direction of torque about 50 times per second?
Regards,
Wojciech

