Tool/software: Code Composer Studio
Hi,
I have some questions about the startup process of the sensorless instaSPIN-FOC system and the Corresponding parameters setting in the InstaSPIN project.
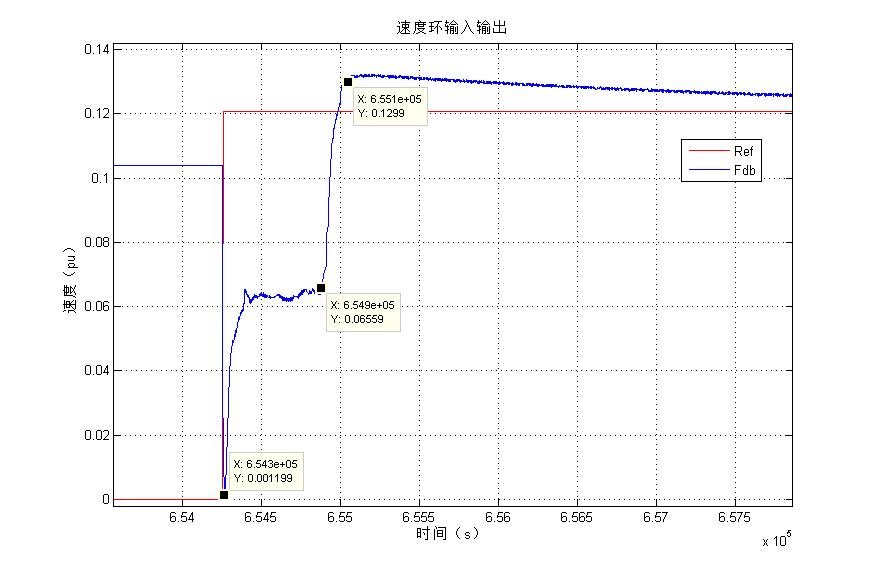
My UAV system has four motors driving by the sensorless-FOC, and I find that the four motors's startup is out of sync when I activate the drone. And I find the startup time vary from each startup process. Sometimes the motor starts up smoothly and sometimes there seems to have a pause in the startup process.You may refer to the figure showed below.
There are two related parameters should be set in the file of user.h: USER_ZEROSPEEDLIMIT and USER_FORCE_ANGLE_FREQ_Hz.The datasheet of SPRUHJ1G relates that USER_ZEROSPEEDLIMIT defines the low speed limit for the flux integrator, and it's typical value is 0.002 pu. And USER_FORCE_ANGLE_FREQ_Hz defines the force angle frequency ,and typical force angle start-up speed is 1.0.Are there any proposals to set the parameters ?And how to estimate whether the parameters are the best setting? Are there any other settings in the InstaSPIN project in order to get ideal startup process. Thanks.