


Part Number: TMS320F28069
Other Parts Discussed in Thread: MOTORWARE
Hi C2000 Team,
We received feedback from the customer that they are seeing ADC corruption on the TMS320F28069. See below for additional details:
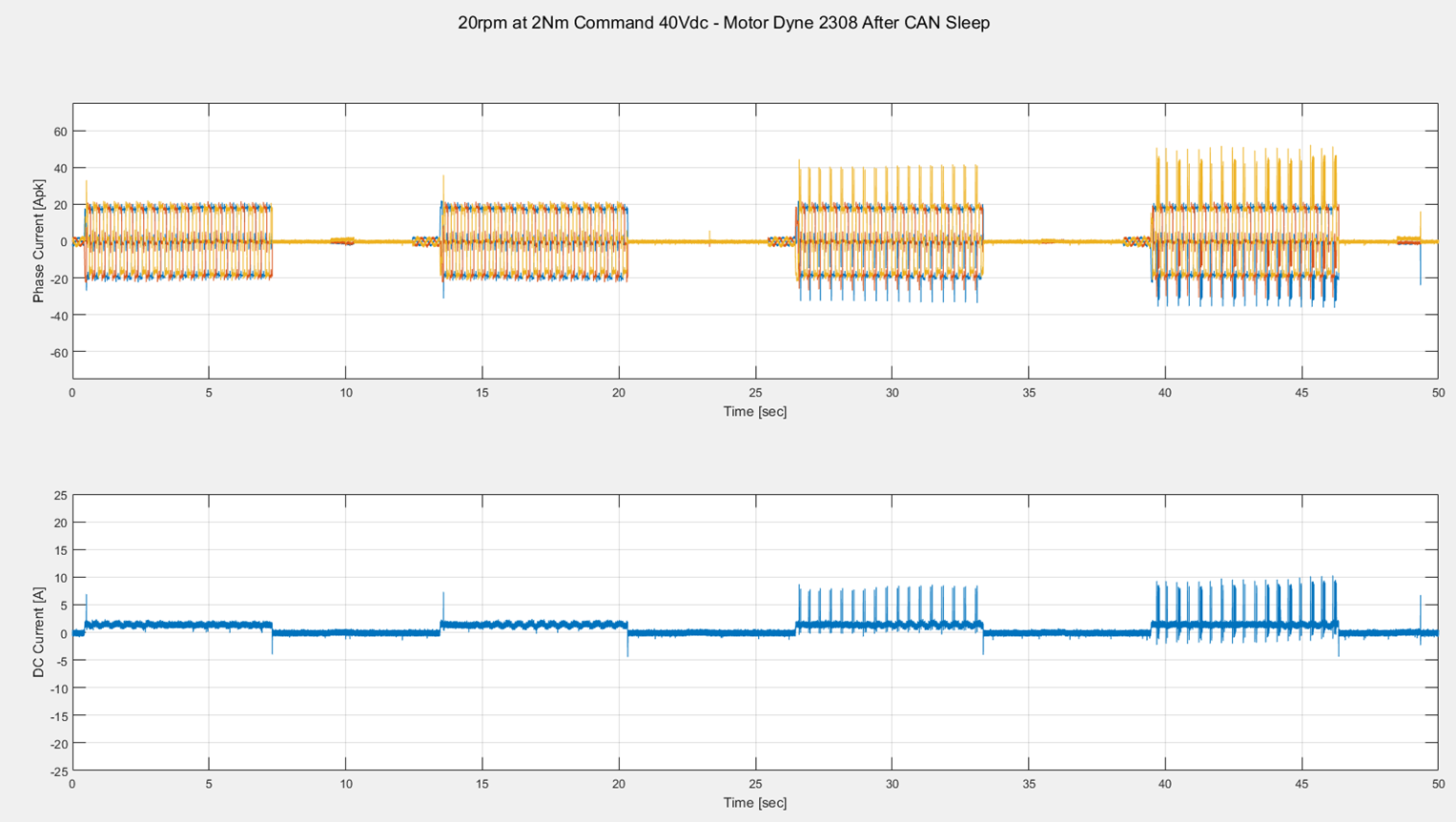
- ADC corruption of the 3 phase current feedback will cause motor control to be unreliable
- It has been observed phase C is most susceptible on motor dyne
- TI has indicated ADC issues with this processor see SPRZ342N http://www.ti.com/lit/er/sprz342n/sprz342n.pdf
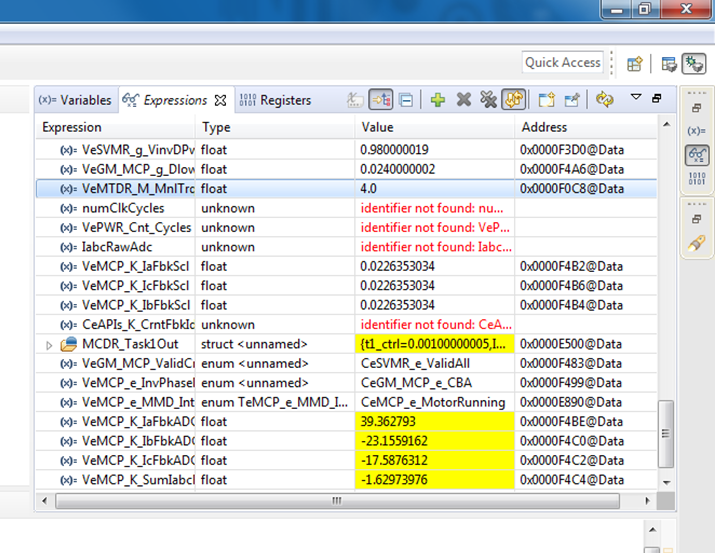
Normal ADC function, all feedback currents read.
Sum (Ia, Ib, Ic) ~= 0
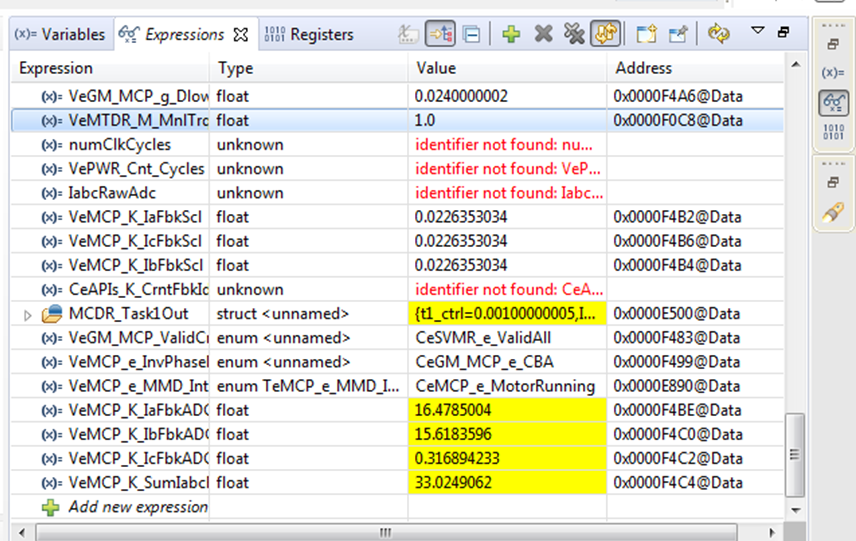
Eventually Ic ADC feedback will stop reading – but oscilloscope shows really high current on the phase C
Sum (Ia, Ib, Ic) = 33
Do we have a suggested way to implement a fix?
Thanks,
Barend


