Part Number: TMS320F280049C
Hi,
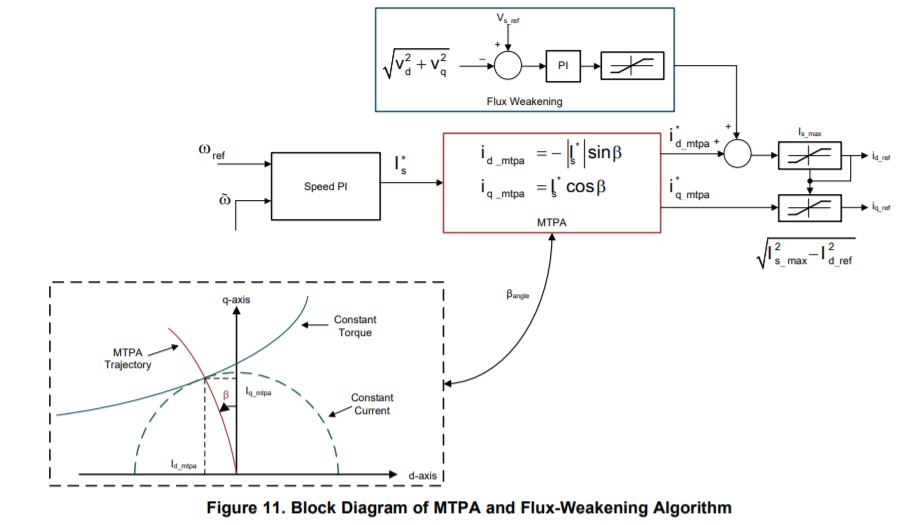
I have a doubt regarding lab 13 of Motor SDK - is13_fwc_mtpa. The document mentions the following:

I understand the field weakening and MTPA code, but what I do no get is the method of obtaining the beta.
If the PID loop of field weakening is generating some output, it means that the Vs (sqrt(Vd^2 + Vq^2)) has reached Vs_ref (Vdc/sqrt(3)). Are we not delaying flux weakening by waiting for beta_fw to be > beta_mtpa?
I am thinking the beta value should be: beta_mtpa + beta_fw. Let me know if I am missing out on something.