


Part Number: TMS320F28335
Tool/software: Code Composer Studio
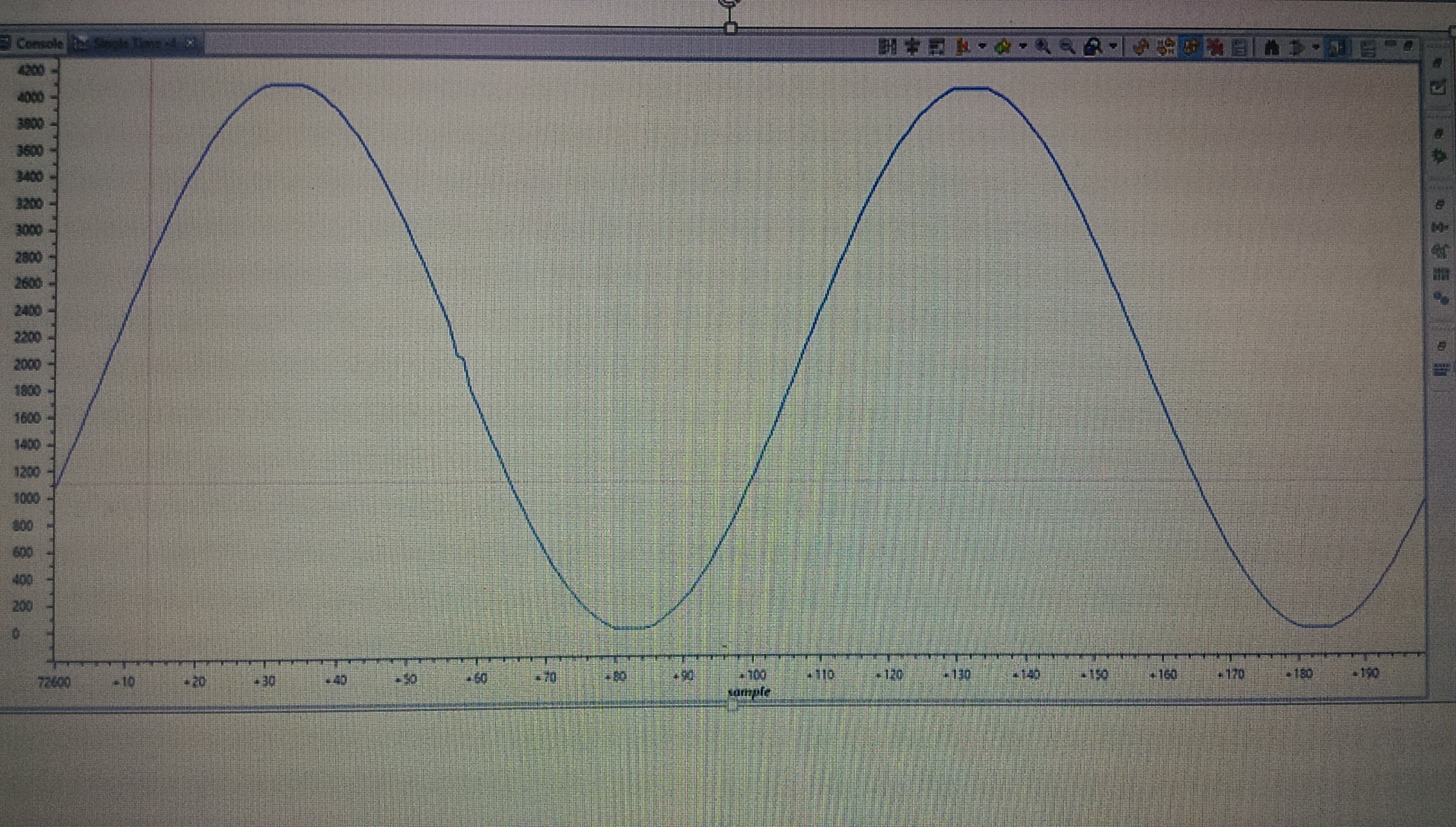
I'm traying to sample a current signal but I have a problem with the sample, the sample frequency is a 12kHz from the ePMW2 and the current signal is 60Hz, the next figure shown the signal sampled and the second figure is of a signal current of 65Hz and the signal of 65 Hz is distorted, I'm using a 200 data circular buffer
void InitAdc(void)
{
//--- Reset the ADC module
AdcRegs.ADCTRL1.bit.RESET = 1; // Reset the ADC
// Must wait 2 ADCCLK periods for the reset to take effect. The ADC is
// already reset after a DSP reset, but this example is just showing good
// coding practice to reset the peripheral before configuring it (as you
// never know why the DSP has started the code over again from the
// beginning). Assuming a 12.5 MHz ADCCLK was previously configured, and
// a 150 MHz SYSCLKOUT, the wait period of 2 ADCCLK periods equates to 24
// CPU clocks. This is the example being used below.
asm(" RPT #22 || NOP"); // Must wait for ADC reset to take effect
//--- Call the ADC_cal() function located in the Boot ROM.
// ADC_cal_func_ptr is a macro defined in the file example_nonBios.h or
// example_BIOS.h (as may be the case for the example being used). This
// macro simply defines ADC_cal_func_ptr to be a function pointer to
// the correct address in the boot ROM.
(*ADC_cal_func_ptr)();
//--- Select the ADC reference
AdcRegs.ADCREFSEL.bit.REF_SEL = 0; // 0=internal, 1=external
//--- Power-up the ADC
AdcRegs.ADCTRL3.all = 0x00EC; // Power-up reference and main ADC
// bit 15-8 0's: reserved
// bit 7-6 11: ADCBGRFDN, reference power, 00=off, 11=on
// bit 5 1: ADCPWDN, main ADC power, 0=off, 1=on
// bit 4-1 0110: ADCCLKPS, clock prescaler, FCLK=HSPCLK/(2*ADCCLKPS)
// bit 0 0: SMODE_SEL, 0=sequential sampling, 1=simultaneous sampling
DelayUs(5000); // Wait 5ms before using the ADC
//--- Configure the other ADC register
AdcRegs.ADCMAXCONV.all = 0xB;
// For CPU servicing of ADC, we are only doing 1 conversion in the
// sequence. So, we only need to configure the first channel
// selection in the sequence. All other channel selection fields
// are don't cares in this example.
AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x0; // Convert Channel 0
AdcRegs.ADCCHSELSEQ1.bit.CONV01 = 0x1;
AdcRegs.ADCCHSELSEQ1.bit.CONV02 = 0x2;
AdcRegs.ADCCHSELSEQ1.bit.CONV03 = 0x3;
AdcRegs.ADCCHSELSEQ2.bit.CONV04 = 0x4;
AdcRegs.ADCCHSELSEQ2.bit.CONV05 = 0x5;
AdcRegs.ADCCHSELSEQ2.bit.CONV06 = 0x6;
AdcRegs.ADCCHSELSEQ2.bit.CONV07 = 0x7;
AdcRegs.ADCCHSELSEQ3.bit.CONV08 = 0x8;
AdcRegs.ADCCHSELSEQ3.bit.CONV09 = 0x9;
AdcRegs.ADCCHSELSEQ3.bit.CONV10 = 0x10;
AdcRegs.ADCTRL1.all = 0x0710;
// bit 15 0: reserved
// bit 14 0: RESET, 0=no action, 1=reset ADC
// bit 13-12 00: SUSMOD, 00=ignore emulation suspend
// bit 11-8 0111:/1111 ACQ_PS (Acquisition), 0111 = 8 x ADCCLK
// bit 7 0: CPS (Core clock), 0: ADCCLK=FCLK/1, 1: ADCCLK=FCLK/2
// bit 6 0: CONT_RUN, 0=start/stop mode, 1=continuous run
// bit 5 0: SEQ_OVRD, 0=disabled, 1=enabled
// bit 4 1: SEQ_CASC, 0=dual sequencer, 1=cascaded sequencer
// bit 3-0 0000: reserved
AdcRegs.ADCTRL2.all = 0x0900;
// bit 15 0: ePWM_SOCB_SEQ, 0=no action
// bit 14 0: RST_SEQ1, 0=no action
// bit 13 0: SOC_SEQ1, 0=clear any pending SOCs
// bit 12 0: reserved
// bit 11 1: INT_ENA_SEQ1, 1=enable interrupt
// bit 10 0: INT_MOD_SEQ1, 0=int on every SEQ1 conv
// bit 9 0: reserved
// bit 8 1: ePWM_SOCA_SEQ1, 1=SEQ1 start from ePWM_SOCA trigger
// bit 7 0: EXT_SOC_SEQ1, 1=SEQ1 start from ADCSOC pin
// bit 6 0: RST_SEQ2, 0=no action
// bit 5 0: SOC_SEQ2, no effect in cascaded mode
// bit 4 0: reserved
// bit 3 0: INT_ENA_SEQ2, 0=int disabled
// bit 2 0: INT_MOD_SEQ2, 0=int on every other SEQ2 conv
// bit 1 0: reserved
// bit 0 0: ePWM_SOCB_SEQ2, 0=no action
//--- Enable the ADC interrupt
PieCtrlRegs.PIEIER1.bit.INTx6 = 1; // Enable ADCINT in PIE group 1
IER |= 0x0001; // Enable INT1 in IER to enable PIE group
} // end InitAdc()
//--- end of file -----------------------------------------------------
interrupt void ADCINT_ISR(void) // PIE1.6 @ 0x000D4A ADCINT (ADC)
{
static Uint16 *Current1Ptr = Current1; // Pointer to ADC data buffer
static Uint16 *Current2Ptr = Current2;
static Uint16 *Current3Ptr = Current3;
static Uint16 *Current4Ptr = Current4;
static Uint16 *Current5Ptr = Current5;
static Uint16 *Voltage_ac1Ptr = Voltage_ac1;
static Uint16 *Voltage_ac2Ptr = Voltage_ac2;
static Uint16 *Voltage_ac3Ptr = Voltage_ac3;
static Uint16 *Voltage_dc1Ptr = Voltage_dc1;
static Uint16 *Voltage_dc2Ptr = Voltage_dc2;
static Uint16 *temperaturePtr = temperature;
static volatile Uint16 GPIO34_count = 0; // Counter for pin toggle
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; // Must acknowledge the PIE group
//--- Manage the ADC registers
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1; // Reset SEQ1 to CONV00 state
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1; // Clear ADC SEQ1 interrupt flag
AdcRegs.ADCTRL2.bit.RST_SEQ2 = 1; // Reset SEQ2 to CONV08 state
AdcRegs.ADCST.bit.INT_SEQ2_CLR = 1; // Clear ADC SEQ2 interrupt flag
//--- Read the ADC result
*Current1Ptr++= AdcMirror.ADCRESULT0; // Read the result
*Current2Ptr++ = AdcMirror.ADCRESULT1;
*Current3Ptr++ = AdcMirror.ADCRESULT2;
*Current4Ptr++ = AdcMirror.ADCRESULT3;
*Current5Ptr++ = AdcMirror.ADCRESULT4;
*Voltage_ac1Ptr++ = AdcMirror.ADCRESULT5;
*Voltage_ac2Ptr++ = AdcMirror.ADCRESULT6;
*Voltage_ac3Ptr++ = AdcMirror.ADCRESULT7;
*Voltage_dc1Ptr++ = AdcMirror.ADCRESULT8;
*Voltage_dc2Ptr++ = AdcMirror.ADCRESULT9;
*temperaturePtr++ = AdcMirror.ADCRESULT10;
//--- Brute-force the circular buffer
if( Current1Ptr == (Current1 + ADC_BUF_LEN) )
{
Current1Ptr = Current1; // Rewind the pointer to the beginning
}
if( Current2Ptr == (Current2 + ADC_BUF_LEN) )
{
Current2Ptr = Current2;
}
if( Current3Ptr == (Current3 + ADC_BUF_LEN) )
{
Current3Ptr = Current3;
}
if( Current4Ptr == (Current4 + ADC_BUF_LEN) )
{
Current4Ptr = Current4;
}
if( Current5Ptr == (Current5 + ADC_BUF_LEN) )
{
Current5Ptr = Current5;
}
if( Voltage_ac1Ptr == (Voltage_ac1 + ADC_BUF_LEN) )
{
Voltage_ac1Ptr = Voltage_ac1;
}
if( Voltage_ac2Ptr == (Voltage_ac2 + ADC_BUF_LEN) )
{
Voltage_ac2Ptr = Voltage_ac2;
}
if( Voltage_ac3Ptr == (Voltage_ac3 + ADC_BUF_LEN) )
{
Voltage_ac3Ptr = Voltage_ac3;
}
if( Voltage_dc1Ptr == (Voltage_dc1 + ADC_BUF_LEN) )
{
Voltage_dc1Ptr = Voltage_dc1;
}
if( Voltage_dc2Ptr == (Voltage_dc2 + ADC_BUF_LEN) )
{
Voltage_dc2Ptr = Voltage_dc2;
}
if( temperaturePtr == (temperature+10) )
{
temperaturePtr = temperature;
}
}
void InitEPwm(void)
{
//---------------------------------------------------------------------
//--- Must disable the clock to the ePWM modules if you
//--- want all ePMW modules synchronized.
//---------------------------------------------------------------------
asm(" EALLOW"); // Enable EALLOW protected register access
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
asm(" EDIS"); // Disable EALLOW protected register access
//---------------------------------------------------------------------
//---------------------------------------------------------------------
EPwm2Regs.TBCTL.bit.CTRMODE = 0x3; // Disable the timer
EPwm2Regs.TBCTL.all = 0xC033; // Configure timer control register
// bit 15-14 11: FREE/SOFT, 11 = ignore emulation suspend
// bit 13 0: PHSDIR, 0 = count down after sync event
// bit 12-10 000: CLKDIV, 000 => TBCLK = HSPCLK/1
// bit 9-7 000: HSPCLKDIV, 000 => HSPCLK = SYSCLKOUT/1
// bit 6 0: SWFSYNC, 0 = no software sync produced
// bit 5-4 11: SYNCOSEL, 11 = sync-out disabled
// bit 3 0: PRDLD, 0 = reload PRD on counter=0
// bit 2 0: PHSEN, 0 = phase control disabled
// bit 1-0 11: CTRMODE, 11 = timer stopped (disabled)
EPwm2Regs.TBCTR = 0x0000; // Clear timer counter
EPwm2Regs.TBPRD = ADC_SAMPLE_PERIOD; // Set timer period ADC_SAMPLE_PERIOD=SYSCLK/12kHz=12500-1=12449
EPwm2Regs.TBPHS.half.TBPHS = 0x0000; // Set timer phase
EPwm2Regs.ETPS.all = 0x0100; // Configure SOCA
// bit 15-14 00: EPWMxSOCB, read-only
// bit 13-12 00: SOCBPRD, don't care
// bit 11-10 00: EPWMxSOCA, read-only
// bit 9-8 01: SOCAPRD, 01 = generate SOCA on first event
// bit 7-4 0000: reserved
// bit 3-2 00: INTCNT, don't care
// bit 1-0 00: INTPRD, don't care
EPwm2Regs.ETSEL.all = 0x0A00; // Enable SOCA to ADC
// bit 15 0: SOCBEN, 0 = disable SOCB
// bit 14-12 000: SOCBSEL, don't care
// bit 11 1: SOCAEN, 1 = enable SOCA
// bit 10-8 010: SOCASEL, 010 = SOCA on PRD event
// bit 7-4 0000: reserved
// bit 3 0: INTEN, 0 = disable interrupt
// bit 2-0 000: INTSEL, don't care
EPwm2Regs.TBCTL.bit.CTRMODE = 0; // Enable the timer in count up mode
//---------------------------------------------------------------------
//--- Enable the clocks to the ePWM module.
//--- Note: this should be done after all ePWM modules are configured
//--- to ensure synchronization between the ePWM modules.
//---------------------------------------------------------------------
asm(" EALLOW"); // Enable EALLOW protected register access
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; // HSPCLK to ePWM modules enabled
asm(" EDIS"); // Disable EALLOW protected register access
} // end InitEPwm()
//--- end of file -----------------------------------------------------
. Could you tell me why is happen?. The code is below.
Current signal of 60Hz
Current signal of 65Hz




