Other Parts Discussed in Thread: CONTROLSUITE
Customer able to get his sensored motor spinning at a high rate with DRV8312-C2-KIT. This is a low inductance, hall-sensored motor. We were able to modify the code to speed up PWM and increase the speed control of the GUI in Hall-sensored mode. But we need help with optimization.
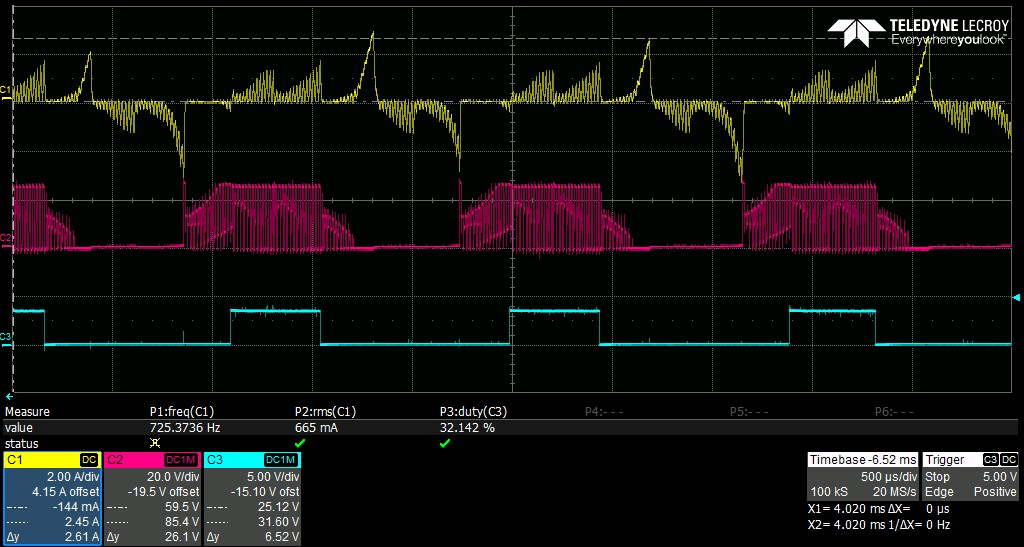
Here is a scope shot of motor waveforms while spinning. Top is phase current, middle is voltage and bottom is PWM_A out of the MCU. There is a large current spike and the voltage waveform looks like commutation is a little late. Do you agree? and if so, how is the timing adjusted in the code?