Part Number: TMS320F28035
Other Parts Discussed in Thread: C2000WARE
CAN Bit-Timing Configuration
I am using 28379 at 500KHZ and using CANBitRateSet(CANB_BASE, 200000000, 500000); to set the rate.
So to set the same baud rate for 28035 what should I have my registers for Setup.
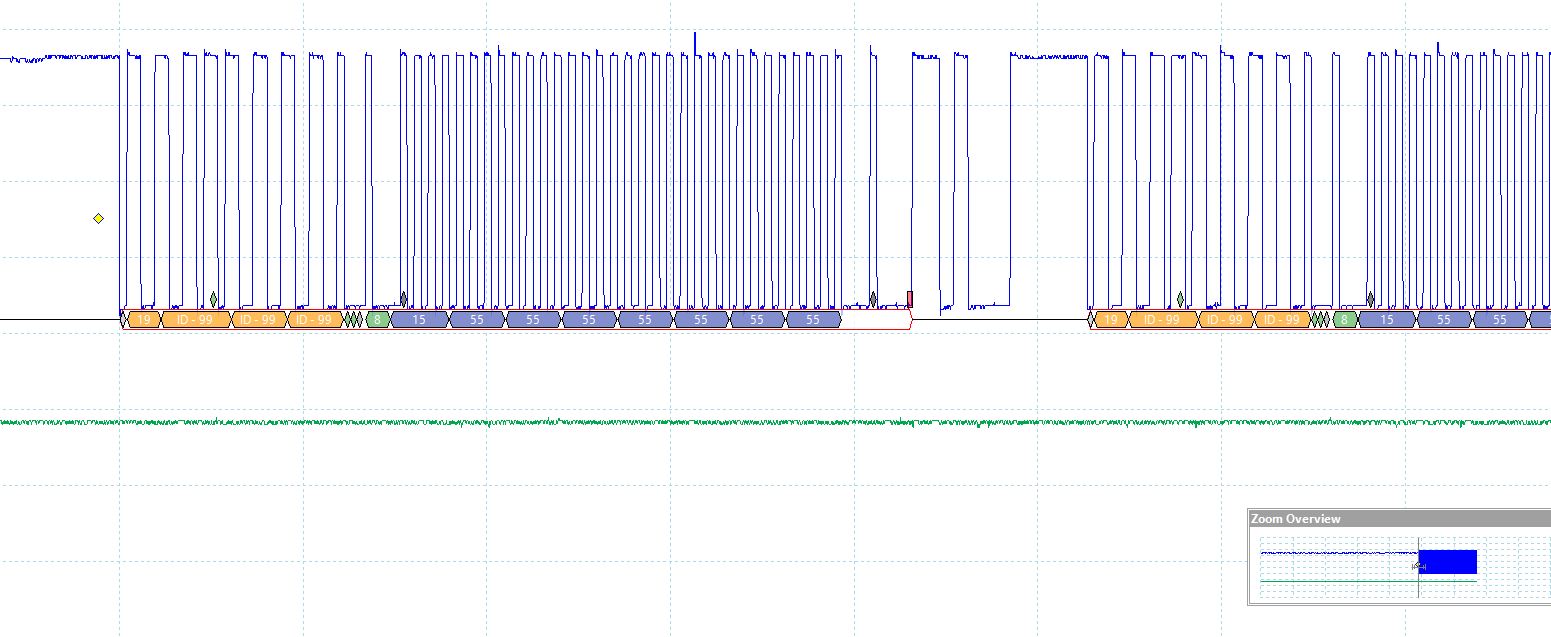
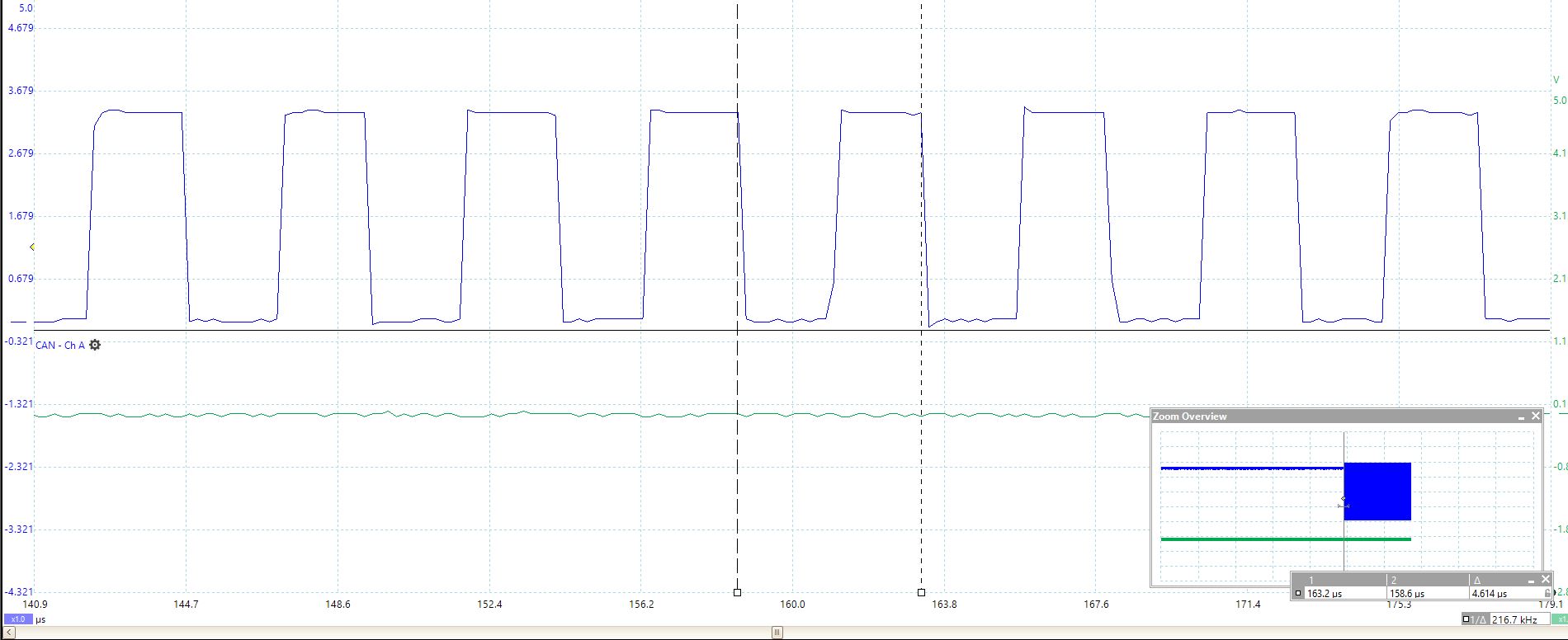
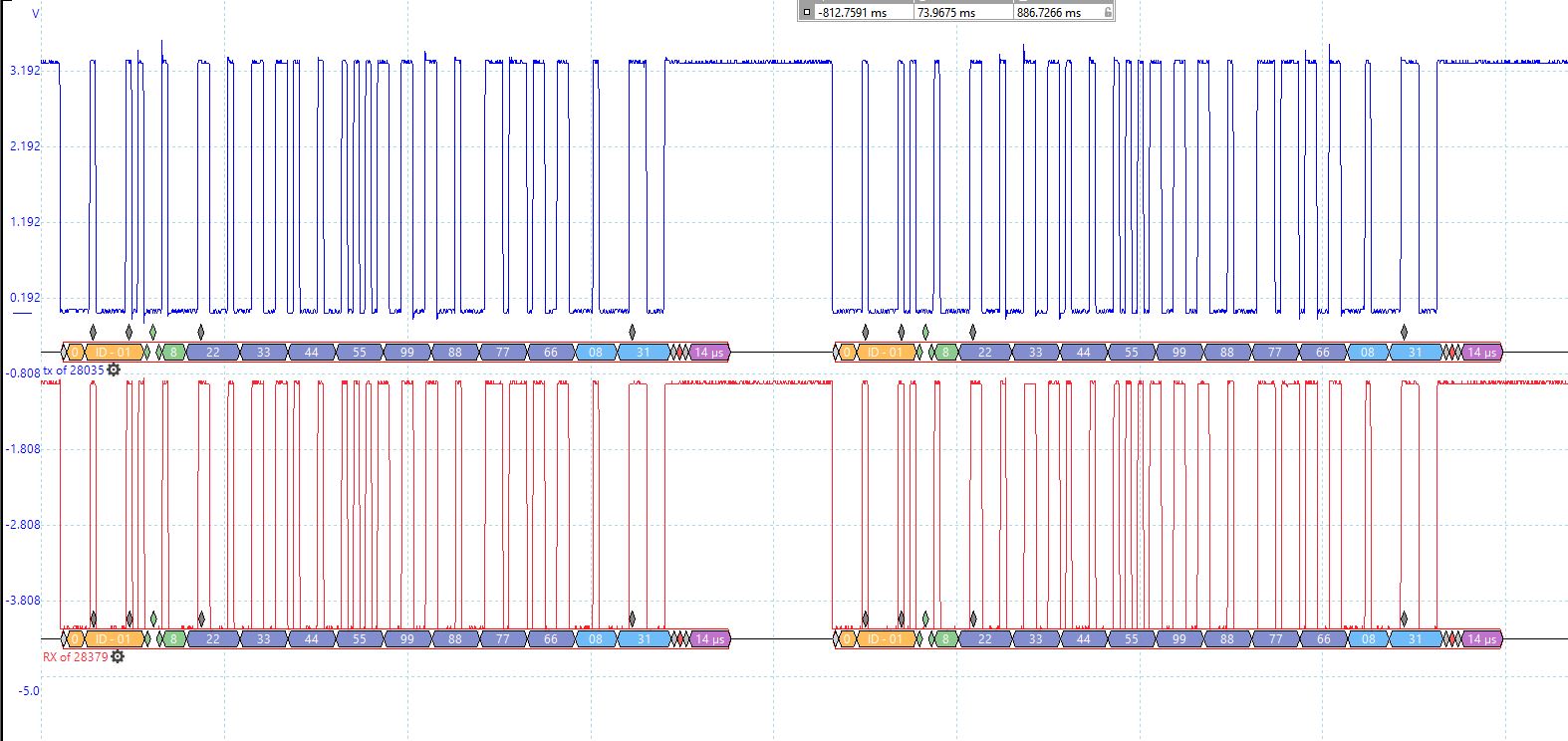
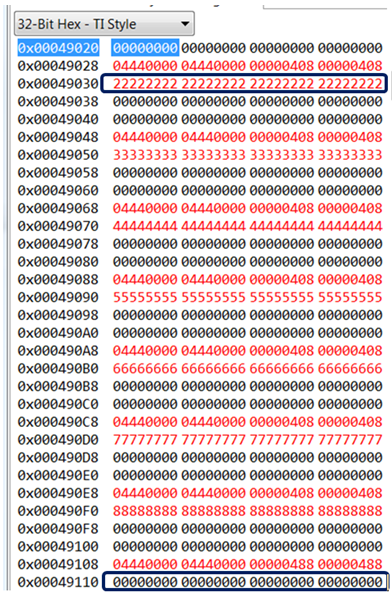
I feel the baud rate is not correctly set since I send 8 bytes on mailbox 25 from 28035 to 28379 but it in 28379 code in the Rx interrupt I always get the error bit set. I think I might have not correctly set the baud rate. Can you verify that? thanks
ECanaShadow.CANBTC.bit.BRPREG = 6;
ECanaShadow.CANBTC.bit.TSEG2REG = 1;
ECanaShadow.CANBTC.bit.TSEG1REG = 6;