Part Number: TMS320F28379D
Tool/software: Code Composer Studio
Good day,
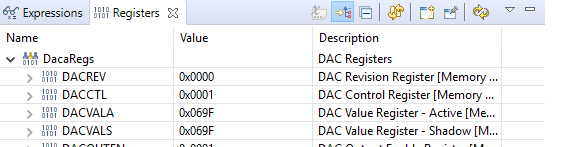
I am using the ADC SOC EPWM example in which I added DAC configuration in order to test the ADC to DAC circuit. I could verify that that the circuit works well, but the DAC output seems not to update the output once I change the ADC input.
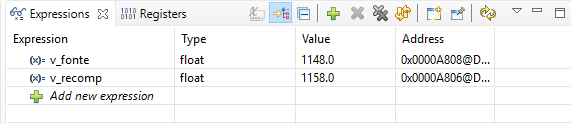
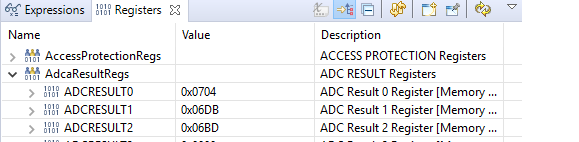
I verified that the new ADC value is updated in the Registers window. However the Expressions window keep the initial value. How do I make sure that the DAC ouput follows the ADC input ?
Please follow below the interrupt command and the windows result
interrupt void adca1_isr(void)
{
v_fonte = AdcaResultRegs.ADCRESULT0;
v_recomp = v_fonte + 10;
DAC_PTR[DAC_NUM]->DACVALS.all = v_recomp;
}