Hello,
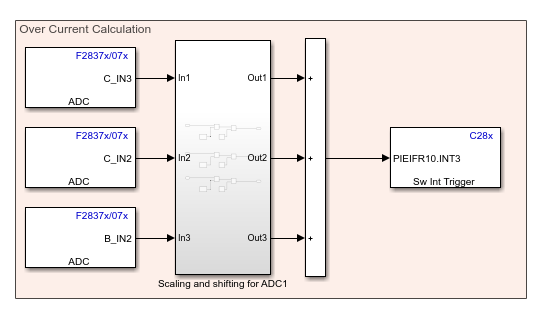
I am trying to build a model in Simulink to trip the ePWM signals while comparing a value (threshold value) from ADC. Basically, I am trying to implement a protection logic for my circuit. The constraint is- I have to implement this trip logic in software and on a priority higher than the normal code.
Previously, I use to get the value from ADC and compare it with if logic and write the logic directly in the register using 'Memory Copy' block.
I could not figure out how to implement it using the software interrupt or the Hardware interrupts. Please suggest.