


Part Number: TMS320F280049
Hi expert,
My customer meets trick situations when using EPWM deadband. In duty equals zero situation, some glitch exists on the output.
Below are their configuration.
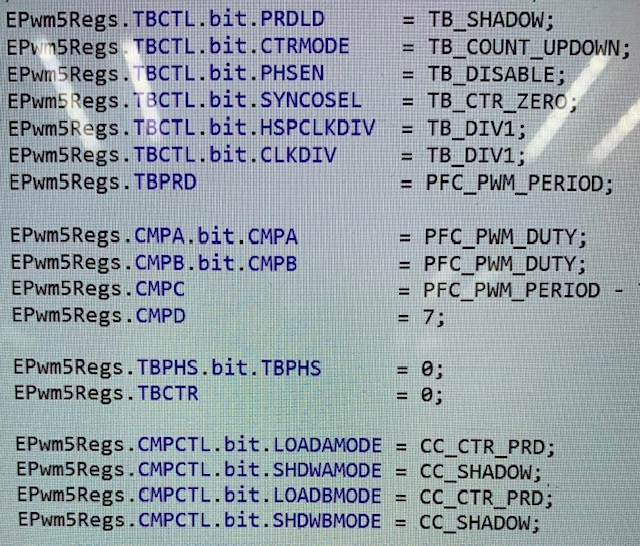
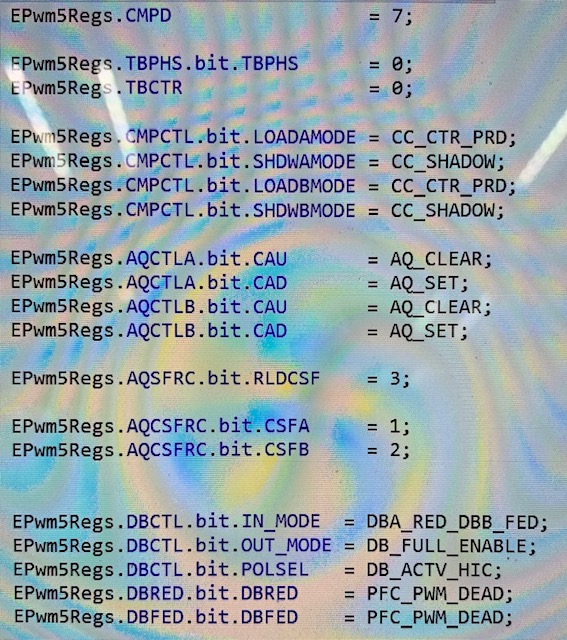
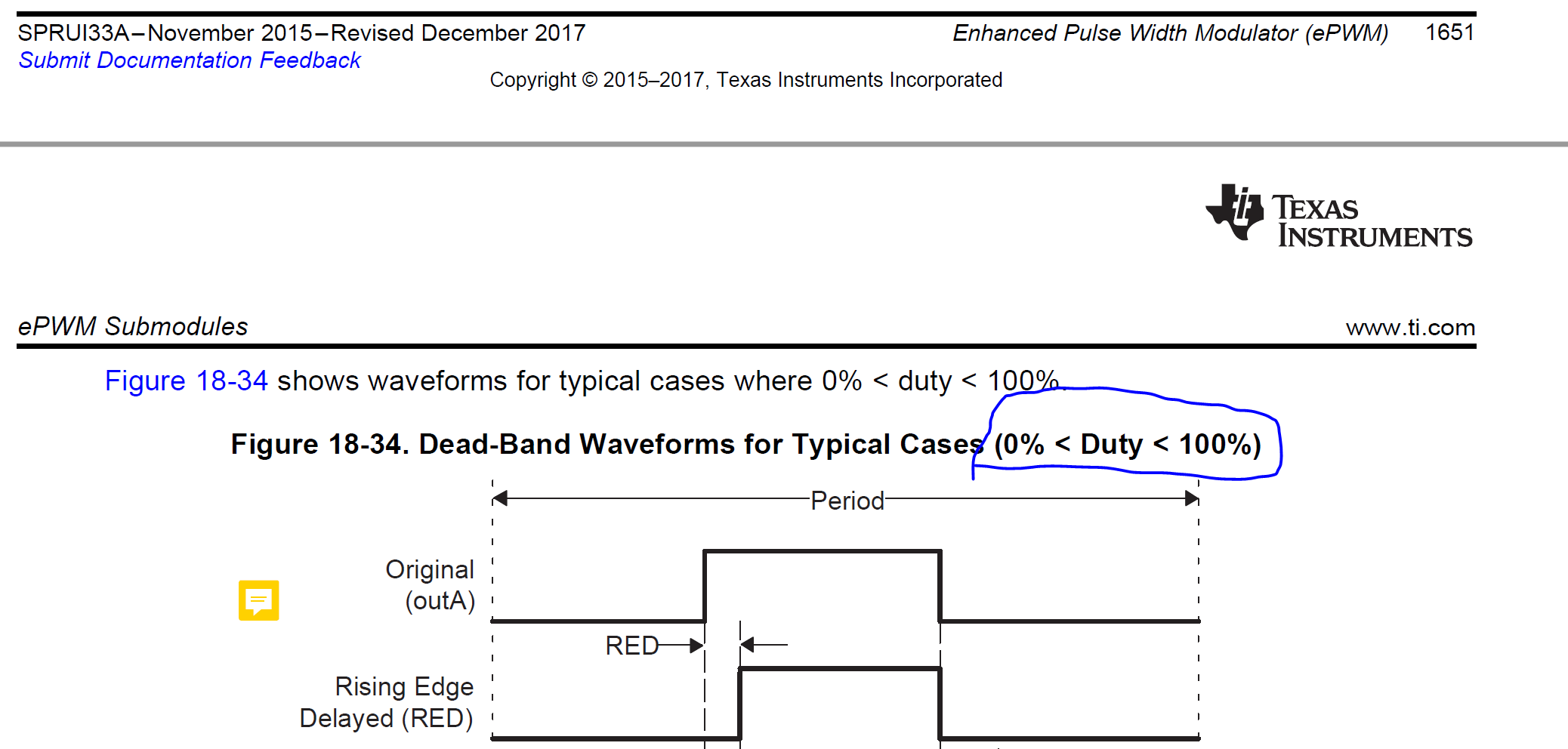
BTW, could you if below page on datasheet including duty equals zero condition?
Thanks
Sheldon

