
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Original question:

I observed we have 2 different PID equations.
In ctrl.c ,
Kp = _IQ(0.1);
Ki = _IQ(pUserParams->ctrlPeriod_sec/0.004);
Kd = _IQ(0.0);
outMin = _IQ(-0.95);
outMax = _IQ(0.95); and these values are called in main file in user_set_params () function
In user.c
RoverLs_d = Rs/Ls_d;
Kp_Id = _IQ((0.25*Ls_d*fullScaleCurrent)/(ctrlPeriod_sec*fullScaleVoltage));
Ki_Id = _IQ(RoverLs_d*ctrlPeriod_sec);
RoverLs_q = Rs/Ls_q;
Kp_Iq = _IQ((0.25*Ls_q*fullScaleCurrent)/(ctrlPeriod_sec*fullScaleVoltage));
Ki_Iq = _IQ(RoverLs_q*ctrlPeriod_sec);
Kd = _IQ(0.0);
This equation is called in main in softwareupdate () function in main.
Why both PID's are different , in what condition which one is used?
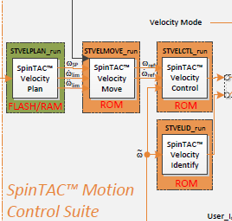
2. What is difference between Instaspin -FOC and Instaspin -spintac. I understand if qep is used , we dont need speed loop to determine velocity but how this 2 block diagrams are different?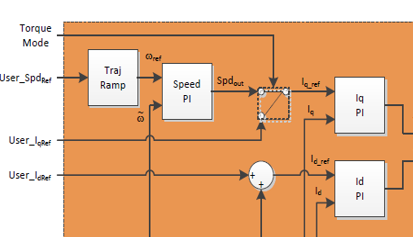
 en
en
3. What equation are used in velocity plan , move and control if qep is not used in 2nd block diagram?
4. What equations of pid is used in 1st block diagram?



