Part Number: TMDSHVMTRPFCKIT
Other Parts Discussed in Thread: DRV8312
Dear team:
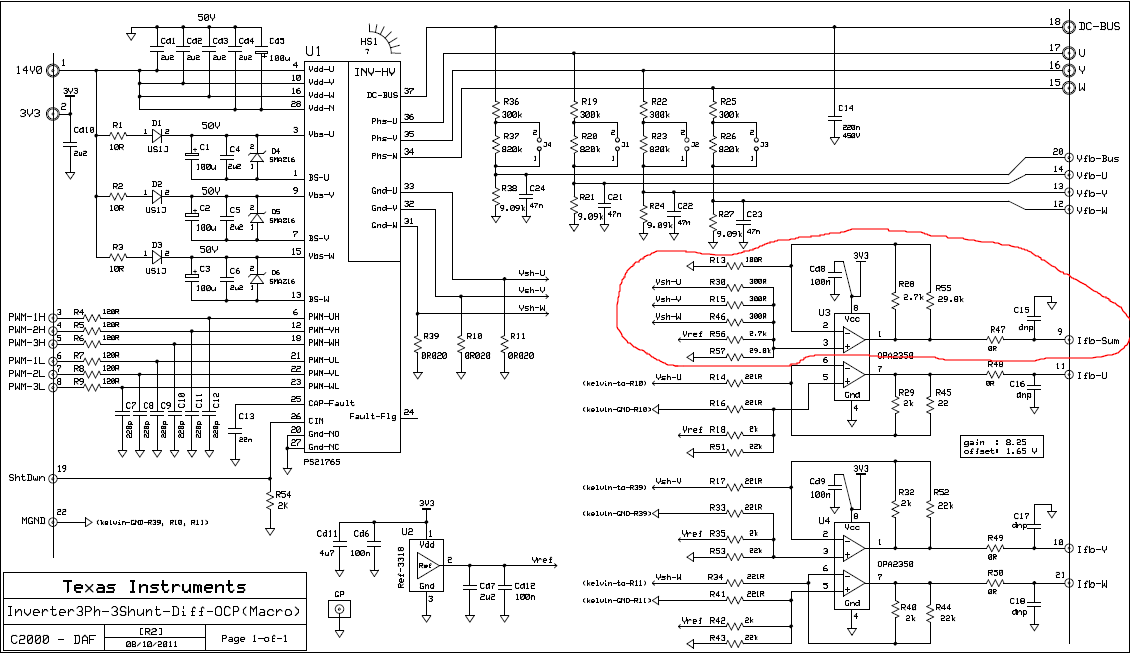
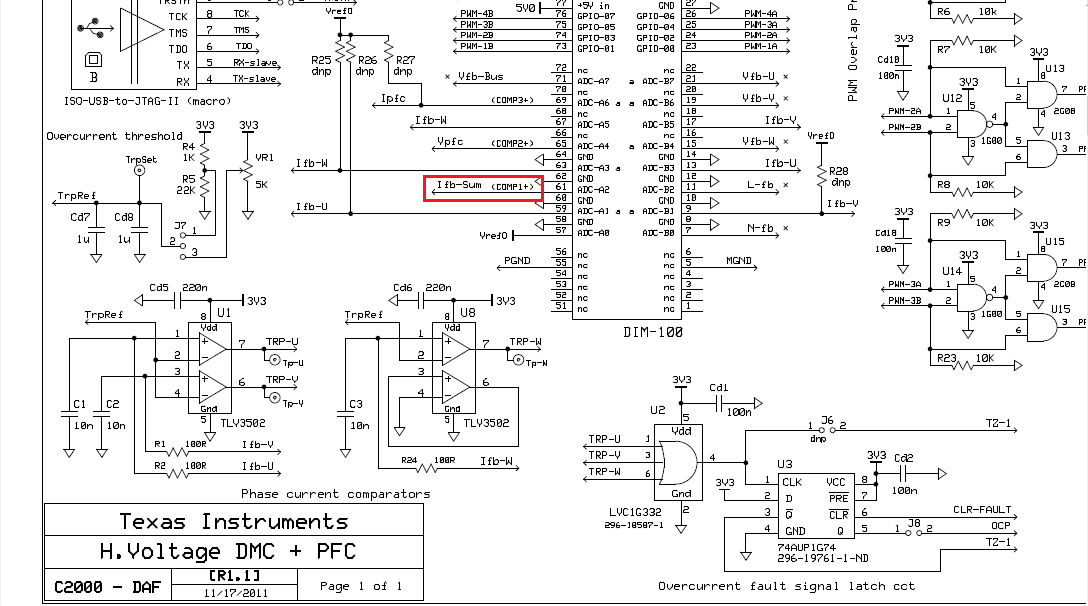
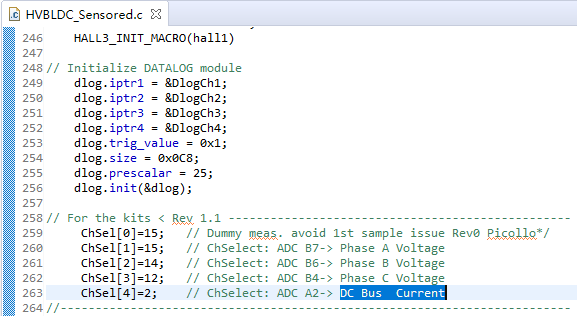
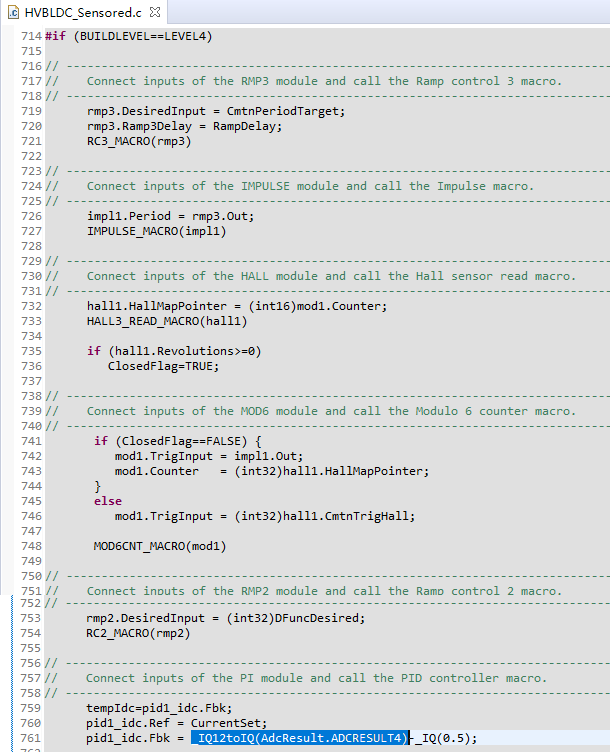
As the pictrue shows above, Ifb-SUM is the sum of feedback current IA, IB, IC. I looked at the current loop control code in the routine. The current (Ifb-SUM) is the bus current.
Question 1: Should the sum of three-phase currents be zero at any time?
For example, Clarke transform usually requires two-phase current, and three-phase bridge drive current will be equipped with two current acquisition circuits (such as AB two-phase), IC = 0-IA-IB.
If so, why is the sum of three-phase current feedback bus current?
Question 2: Will the waveform of Ifb-SUM be the same as that of Shunt resistance or closed-loop Hall current sensor on bus?
Best regards