Dear C2000 team,
Can you help me with the following issue regarding the eCAN of the TMS320F28x:
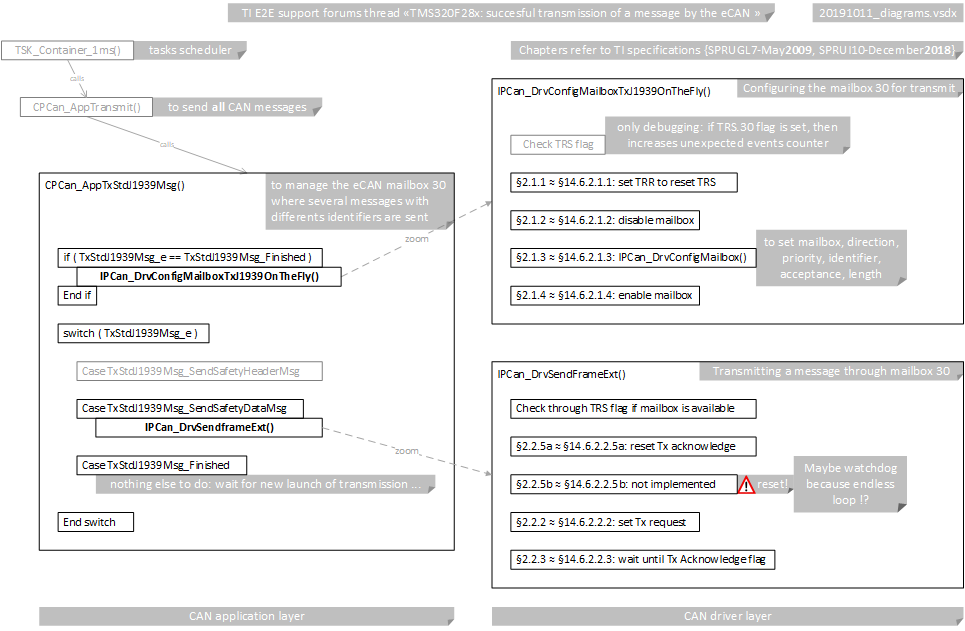
According to the chapter 14.6.2.2 of the specification SPRUI10 – Dec 2018,
- At the step 3, after a successful transmission, the transmit-acknowledge flag is set
- At the step 4, the TRS flag is reset to 0
I do focus on these bits to check that CAN messages are sent successfully.
During the last days, I am not really able to match the specification and my tests.
For example as described in §14.6.2.2.3, I cannot always get the transmit acknowledge flag.
How can I work around this to get a realibe confirmation?
Looking forward for your feedback.
Best regards,
Nico