


Other Parts Discussed in Thread: HVPMSMMTR, MOTORWARE
Hello everyone,
I'm an undergrad mechanical engineering student trying to control a PMSM motor such that it would act as a servo-motor, switching from one angle position to a target angle position.
I am using the HVPMSMMTR motor on the TI website, which is an Anaheim Automation EMJ-04APB22 PMSM AC ServoMotor, the F28069M ControlCard (with InstaSPIN Motion & FOC), and the encoder cables that came with the kit.
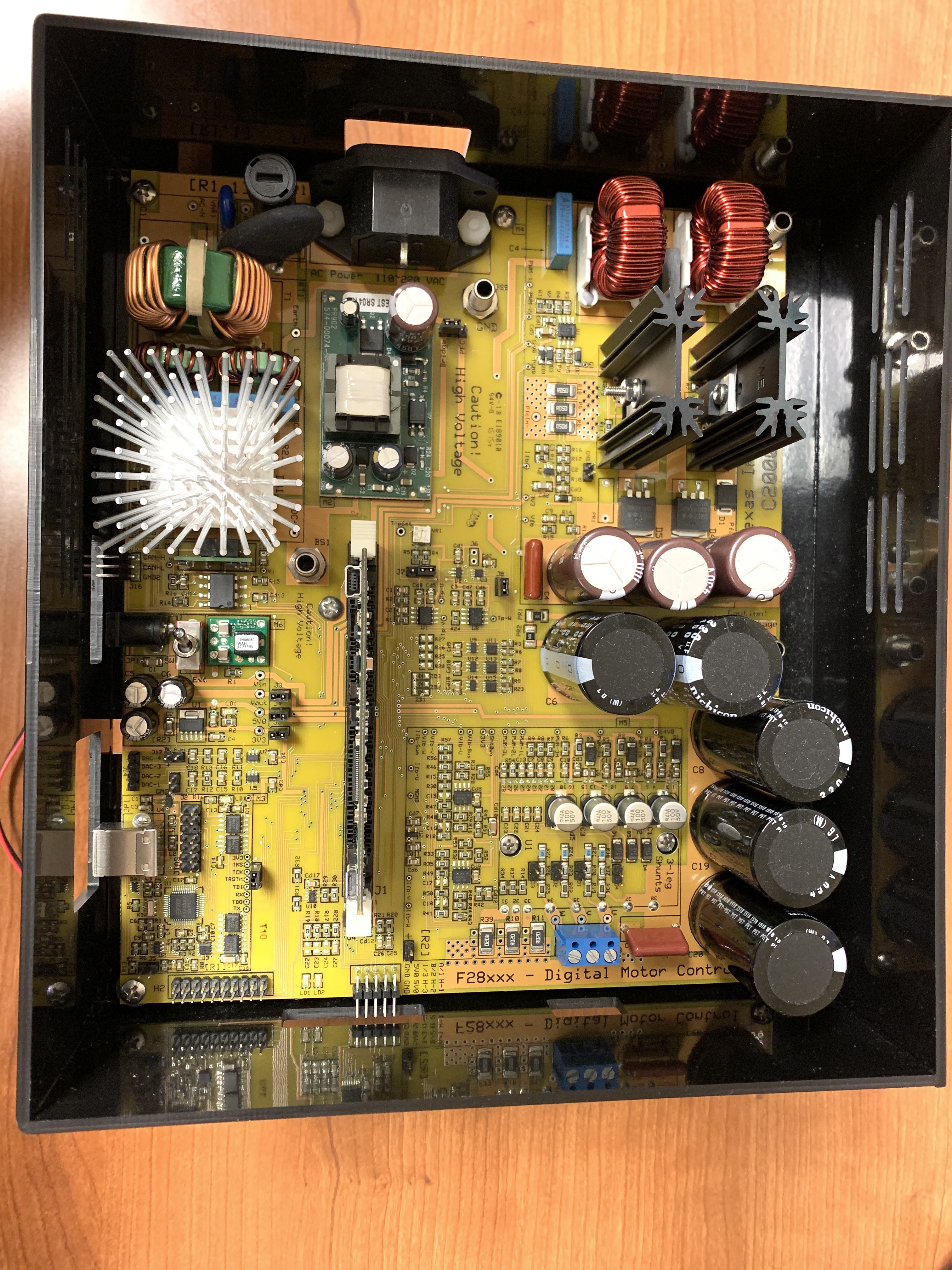

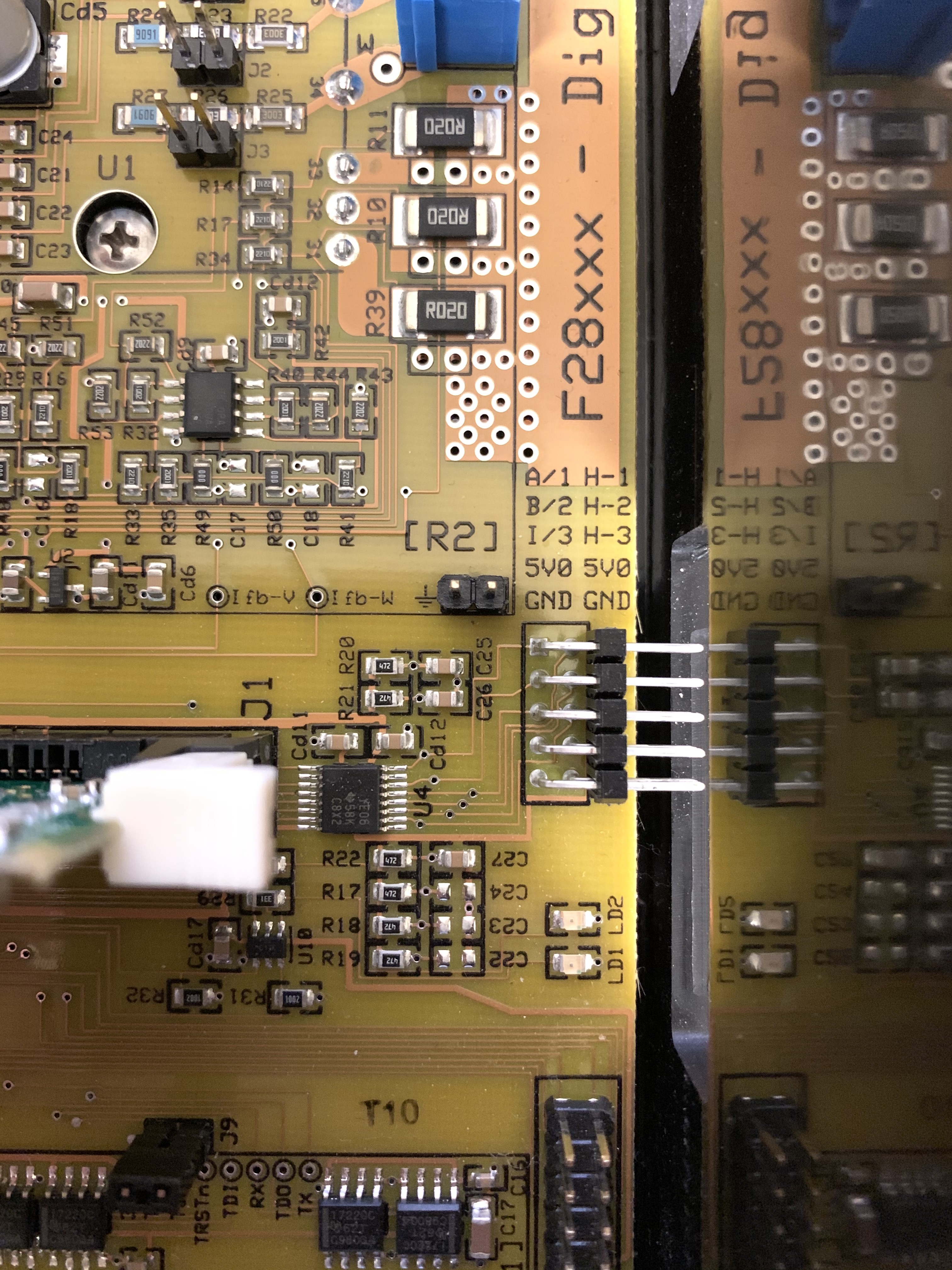
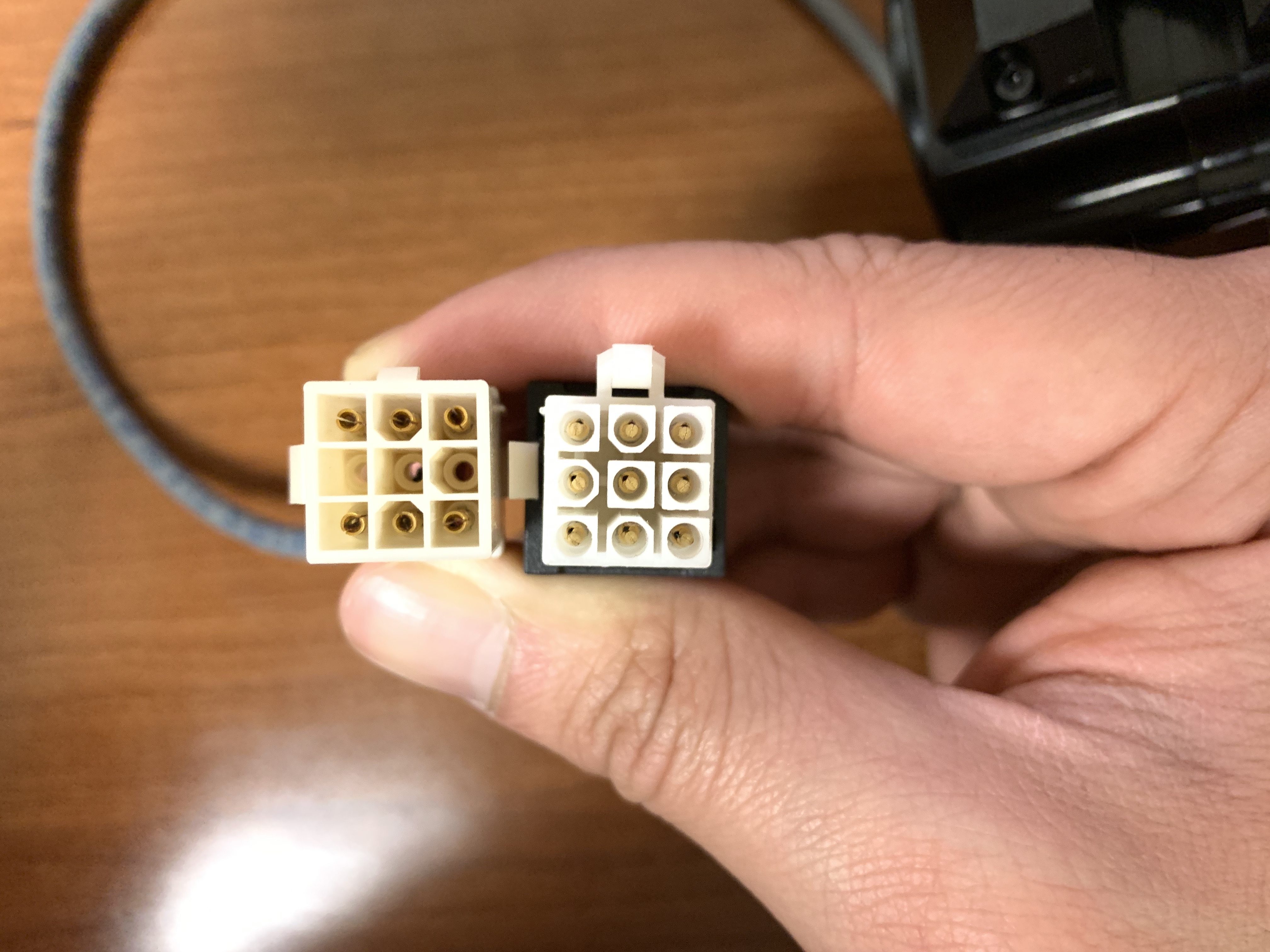
I got the motor spinning through the GUI, but since I am trying to do servo position control, I am wondering on how you would connect the encoder cables to the board? It seems as if the wiring and the color schemes are reversed for the 5V and the GND, but I am completely new to this so I am not sure.

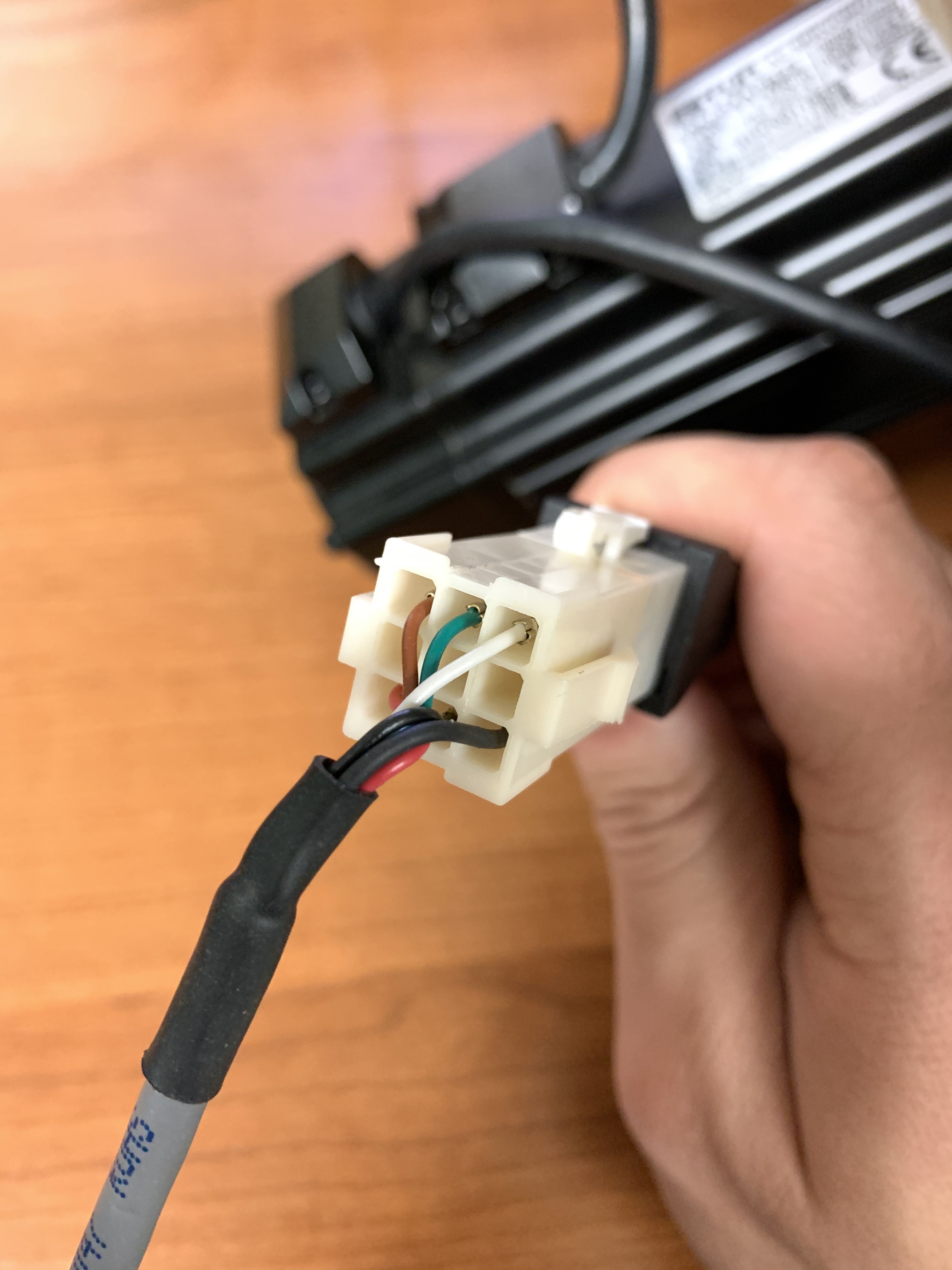


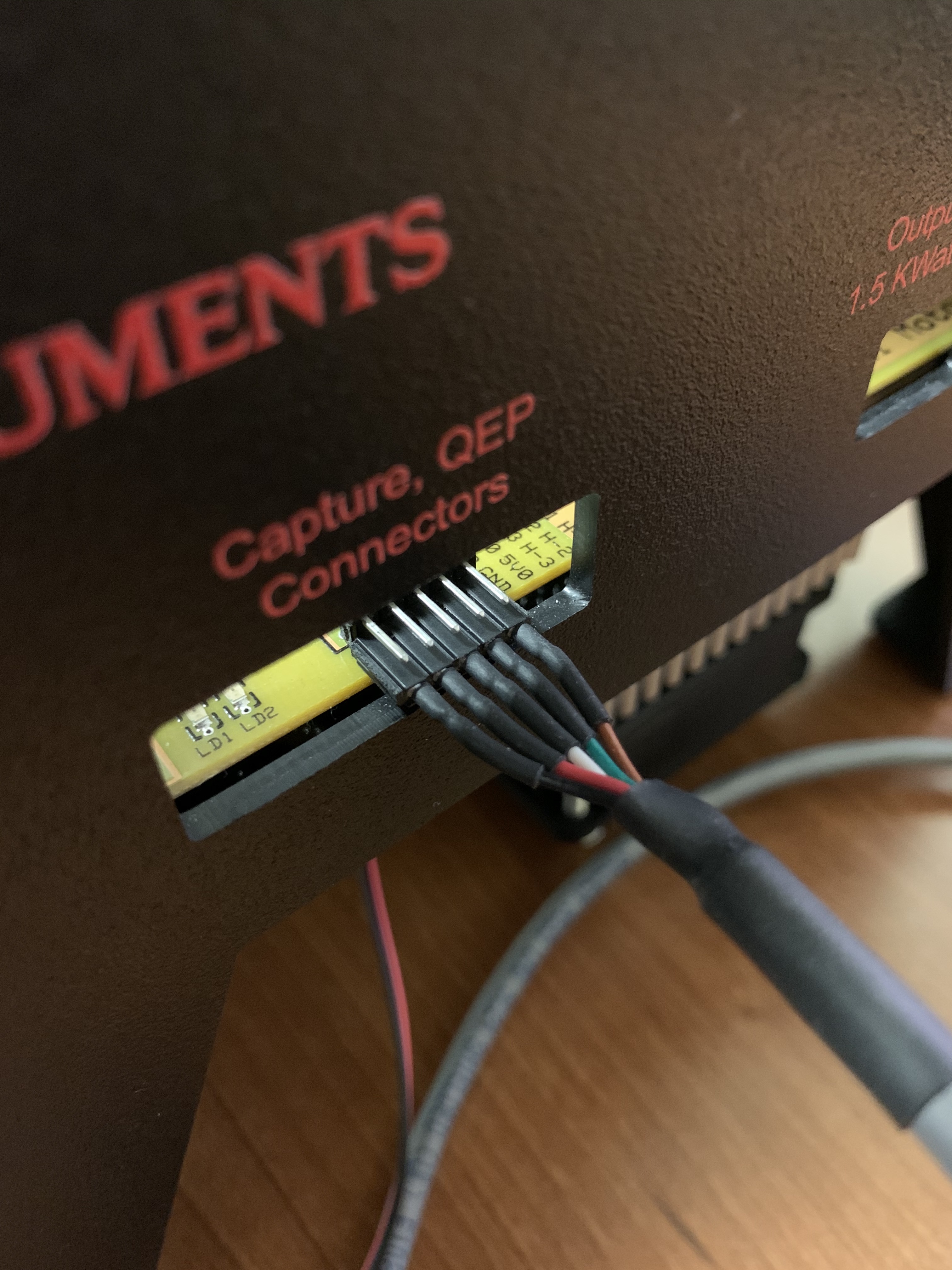
I am also wondering if there's any way I can verify that the incremental encoder inside the motor is working?
I am trying to use the InstaSPIN Motion Labs (Labs 12-13, sensored position transitions / control) It mentions that it is using the hall sensors, H1 to H3, and I am assuming that the incremental encoders present on the motor are compatible with it? (I'm not sure what if they use hall sensors or not)
Thanks in advance!
