


Other Parts Discussed in Thread: CONTROLSUITE
Tool/software: Code Composer Studio
Hello,
I am using the LAUNCHXL-F28379D microcontroller EVM along with an AD9833 waveform generator. I am currently at the stage where I am just trying to make sure that my ADC can effectively sample the sine waves that I am generating with the AD9833 but have run into some trouble. I am essentially just using the adc_soc_continuous_cpu01 example from ControlSuite combined with some of the SPI commands from the spi_loopback_cpu01 example. I know that my SPI communication with the waveform generator is operating properly because when I command a 5kHz signal, I can see the following on an Oscilloscope:
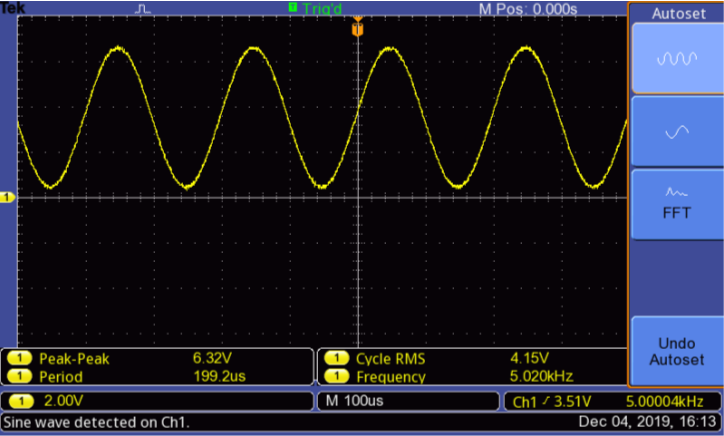
(note that the Oscilloscope probe is set to 1:10 amplification and the actual peak-peak value is only .66V)
Essentially when I try to return the same plot using the ADC, the waveform I get is a mess. I believe I have all my settings correct to guarantee the highest sampling rate I can (SYSCLK = 200MHz, ADCCLK = 50MHz) but from what I can tell, it appears that the ADC is sampling much less frequently than that, since it only takes about 20 samples to capture a full period of the 5kHz waveform.

Below is the code I am using, apologies if it is a bit messy:
//###########################################################################
// FILE: Example_28X7xSpi_FFDLB.c
// TITLE: SPI Digital Loop Back program.
//
//! \addtogroup cpu01_example_list
//! <h1>SPI Digital Loop Back</h1>
//!
//! This program uses the internal loop back test mode of the peripheral.
//! Other then boot mode pin configuration, no other hardware configuration
//! is required. Interrupts are not used.
//!
//! A stream of data is sent and then compared to the received stream.
//! The sent data looks like this: \n
//! 0000 0001 0002 0003 0004 0005 0006 0007 .... FFFE FFFF \n
//! This pattern is repeated forever.
//!
//! \b Watch \b Variables \n
//! - \b sdata , sent data
//! - \b rdata , received data
//
//###########################################################################
// $TI Release: F2837xD Support Library v100 $
// $Release Date: Mon Dec 9 12:58:09 CST 2013 $
//###########################################################################
#include "F28x_Project.h" // Device Headerfile and Examples Include File
#include "math.h"
//definitions for selecting ADC resolution
#define RESOLUTION_12BIT 0 //12-bit resolution
#define RESOLUTION_16BIT 1 //16-bit resolution (not supported for all variants)
//definitions for selecting ADC signal mode
#define SIGNAL_SINGLE 0 //single-ended channel conversions (12-bit mode only)
#define SIGNAL_DIFFERENTIAL 1 //differential pair channel conversions
//buffer for storing conversion results (size must be multiple of 16)
#define RESULTS_BUFFER_SIZE 256
Uint16 AdcaResults[RESULTS_BUFFER_SIZE];
Uint16 resultsIndex;
// Prototype statements for functions found within this file.
// __interrupt void ISRTimer2(void);
void take_adc_conversion(void);
void ConfigureADC(void);
void SetupADCContinuous(Uint16 channel);
void delay_loop(void);
void spi_xmit(Uint16 a);
void spi_fifo_init(void);
void spi_init(void);
void error(void);
void declareFrequency(double freq);
Uint16 rdata; // received data
Uint16 sdata1;
Uint16 sdata2;
Uint16 sdata3;
Uint16 sdata4;
Uint16 sdata5;
float refFreq = 25000000.0;
int MSB;
int LSB;
int i;
long freqWord;
float myPower = 268435456.0; //2^28
float desiredFreq = 5000.0;
void main(void)
{
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xD_SysCtrl.c file.
InitSysCtrl();
// Step 2. Initialize GPIO:
// This example function is found in the F2837xD_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
//This is needed to set ADC GPIOs
InitGpio(); // Skipped for this example
// Setup only the GP I/O only for SPI-A functionality
// This function is found in F2837xD_Spi.c
InitSpiaGpio();
// Step 3. Clear all __interrupts and initialize PIE vector table:
// Disable CPU __interrupts
DINT;
// Initialize PIE control registers to their default state.
// The default state is all PIE __interrupts disabled and flags
// are cleared.
// This function is found in the F2837xD_PieCtrl.c file.
InitPieCtrl();
// Disable CPU __interrupts and clear all CPU __interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the __interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xD_DefaultIsr.c.
// This function is found in F2837xD_PieVect.c.
InitPieVectTable();
//Configure the ADC and power it up
ConfigureADC();
//Setup the ADC for continuous conversions on channel 0
SetupADCContinuous(3);
//Enable global Interrupts and higher priority real-time debug events:
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
//Initialize results buffer
for(resultsIndex = 0; resultsIndex < RESULTS_BUFFER_SIZE; resultsIndex++)
{
AdcaResults[resultsIndex] = 0;
}
resultsIndex = 0;
// Step 4. Initialize all the Device Peripherals:
// This function is found in F2837xD_InitPeripherals.c
// InitPeripherals(); // Not required for this example
spi_fifo_init(); // Initialize the Spi FIFO
spi_init(); // init SPI
// Step 5. User specific code:
// Interrupts are not used in this example.
delay_loop();
declareFrequency(desiredFreq);
//Take ADC conversions forever for all of time
do{
take_adc_conversion();
}while(1);
}
// Step 7. Insert all local Interrupt Service Routines (ISRs) and functions here:
void declareFrequency(double freq)
{
//Converts desired frequency into MSB and LSB commands for Freq0 register on AD9833
freqWord = (freq * myPower) / refFreq;
MSB = (int)((freqWord & 0xFFFC000) >> 14); //Only lower 14 bits are used for data
LSB = (int)(freqWord & 0x3FFF);
//Set control bits 15 ande 14 to 0 and 1, respectively, for frequency register 0
LSB |= 0x4000;
MSB |= 0x4000;
Uint16 sdata1 = 0x2100; //Resets AD9833
Uint16 sdata2 = LSB; //Freq0 register write LSBs
Uint16 sdata3 = MSB; //Freq0 register write MSBs
Uint16 sdata4 = 0xC000; //Phase register write
Uint16 sdata5 = 0x2000; //Release reset
for(i = 1; i < 6; i++)
{
// Transmit data
spi_xmit(sdata1);
// Wait until data is received
while(SpiaRegs.SPIFFRX.bit.RXFFST !=1) { }
//while(SpiaRegs.SPISTS.bit.INT_FLAG !=1) {}
// Check against sent data
rdata = SpiaRegs.SPIRXBUF;
if(rdata != sdata1) error();
sdata1 = sdata2;
sdata2 = sdata3;
sdata3 = sdata4;
sdata4 = sdata5;
delay_loop();
}
}
void delay_loop()
{
long i;
for (i = 0; i < 200; i++) {}
}
void error(void)
{
asm(" ESTOP0"); // Test failed!! Stop!
for (;;);
}
void spi_init()
{
SpiaRegs.SPICCR.all =0x0004F; // Reset on, rising edge, 16-bit char bits
SpiaRegs.SPICTL.all =0x0006; // Enable master mode, normal phase,
// enable talk, and SPI int disabled.
SpiaRegs.SPIBRR =0x007F;
SpiaRegs.SPIPRI.bit.TRIWIRE = 1; //Enable 3 wire mode
SpiaRegs.SPICCR.all =0x00DF; // Relinquish SPI from Reset
SpiaRegs.SPIPRI.bit.FREE = 1; // Set so breakpoints don't disturb xmission
}
void spi_xmit(Uint16 a)
{
SpiaRegs.SPITXBUF=a;
}
void spi_fifo_init()
{
// Initialize SPI FIFO registers
SpiaRegs.SPIFFTX.all=0xE040;
SpiaRegs.SPIFFRX.all=0x2044;
SpiaRegs.SPIFFCT.all=0x0;
}
void take_adc_conversion()
{
//enable ADCINT flags
AdcaRegs.ADCINTSEL1N2.bit.INT1E = 1;
AdcaRegs.ADCINTSEL1N2.bit.INT2E = 1;
AdcaRegs.ADCINTSEL3N4.bit.INT3E = 1;
AdcaRegs.ADCINTSEL3N4.bit.INT4E = 1;
AdcaRegs.ADCINTFLGCLR.all = 0x000F;
//initialize results index
resultsIndex = 0;
//software force start SOC0 to SOC7
AdcaRegs.ADCSOCFRC1.all = 0x00FF;
//keep taking samples until the results buffer is full
while(resultsIndex < RESULTS_BUFFER_SIZE)
{
//wait for first set of 8 conversions to complete
while(0 == AdcaRegs.ADCINTFLG.bit.ADCINT3);
//clear both INT flags generated by first 8 conversions
AdcaRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
AdcaRegs.ADCINTFLGCLR.bit.ADCINT3 = 1;
//save results for first 8 conversions
//
//note that during this time, the second 8 conversions have
//already been triggered by EOC6->ADCIN1 and will be actively
//converting while first 8 results are being saved
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT0;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT1;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT2;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT3;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT4;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT5;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT6;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT7;
//wait for the second set of 8 conversions to complete
while(0 == AdcaRegs.ADCINTFLG.bit.ADCINT4);
//clear both INT flags generated by second 8 conversions
AdcaRegs.ADCINTFLGCLR.bit.ADCINT2 = 1;
AdcaRegs.ADCINTFLGCLR.bit.ADCINT4 = 1;
//save results for second 8 conversions
//
//note that during this time, the first 8 conversions have
//already been triggered by EOC14->ADCIN2 and will be actively
//converting while second 8 results are being saved
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT8;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT9;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT10;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT11;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT12;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT13;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT14;
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT15;
}
//disable all ADCINT flags to stop sampling
AdcaRegs.ADCINTSEL1N2.bit.INT1E = 0;
AdcaRegs.ADCINTSEL1N2.bit.INT2E = 0;
AdcaRegs.ADCINTSEL3N4.bit.INT3E = 0;
AdcaRegs.ADCINTSEL3N4.bit.INT4E = 0;
//at this point, AdcaResults[] contains a sequence of conversions
//from the selected channel
//software breakpoint, hit run again to get updated conversions
//asm(" ESTOP0");
}
//Write ADC configurations and power up the ADC for both ADC A and ADC B
void ConfigureADC(void)
{
EALLOW;
//write configurations
AdcaRegs.ADCCTL2.bit.PRESCALE = 6; //set ADCCLK divider to /4
AdcaRegs.ADCCTL2.bit.RESOLUTION = RESOLUTION_12BIT;
AdcaRegs.ADCCTL2.bit.SIGNALMODE = SIGNAL_SINGLE;
//Set pulse positions to late
AdcaRegs.ADCCTL1.bit.INTPULSEPOS = 1;
//power up the ADC
AdcaRegs.ADCCTL1.bit.ADCPWDNZ = 1;
//delay for 1ms to allow ADC time to power up
DELAY_US(1000);
EDIS;
}
//setup the ADC to continuously convert on one channel
void SetupADCContinuous(Uint16 channel)
{
Uint16 acqps;
//determine minimum acquisition window (in SYSCLKS) based on resolution
if(RESOLUTION_12BIT == AdcaRegs.ADCCTL2.bit.RESOLUTION){
acqps = 14; //75ns
}
else { //resolution is 16-bit
acqps = 63; //320ns
}
EALLOW;
AdcaRegs.ADCSOC0CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC1CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC2CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC3CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC4CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC5CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC6CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC7CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC8CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC9CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC10CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC11CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC12CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC13CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC14CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC15CTL.bit.CHSEL = channel; //SOC will convert on channel
AdcaRegs.ADCSOC0CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC1CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC2CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC3CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC4CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC5CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC6CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC7CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC9CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC10CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC11CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC12CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC13CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC14CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCSOC15CTL.bit.ACQPS = acqps; //sample window is acqps + 1 SYSCLK cycles
AdcaRegs.ADCINTSEL1N2.bit.INT1E = 0; //disable INT1 flag
AdcaRegs.ADCINTSEL1N2.bit.INT2E = 0; //disable INT2 flag
AdcaRegs.ADCINTSEL3N4.bit.INT3E = 0; //disable INT3 flag
AdcaRegs.ADCINTSEL3N4.bit.INT4E = 0; //disable INT4 flag
AdcaRegs.ADCINTSEL1N2.bit.INT1CONT = 0;
AdcaRegs.ADCINTSEL1N2.bit.INT2CONT = 0;
AdcaRegs.ADCINTSEL3N4.bit.INT3CONT = 0;
AdcaRegs.ADCINTSEL3N4.bit.INT4CONT = 0;
AdcaRegs.ADCINTSEL1N2.bit.INT1SEL = 6; //end of SOC6 will set INT1 flag
AdcaRegs.ADCINTSEL1N2.bit.INT2SEL = 14; //end of SOC14 will set INT2 flag
AdcaRegs.ADCINTSEL3N4.bit.INT3SEL = 7; //end of SOC7 will set INT3 flag
AdcaRegs.ADCINTSEL3N4.bit.INT4SEL = 15; //end of SOC15 will set INT4 flag
//ADCINT2 will trigger first 8 SOCs
AdcaRegs.ADCINTSOCSEL1.bit.SOC0 = 2;
AdcaRegs.ADCINTSOCSEL1.bit.SOC1 = 2;
AdcaRegs.ADCINTSOCSEL1.bit.SOC2 = 2;
AdcaRegs.ADCINTSOCSEL1.bit.SOC3 = 2;
AdcaRegs.ADCINTSOCSEL1.bit.SOC4 = 2;
AdcaRegs.ADCINTSOCSEL1.bit.SOC5 = 2;
AdcaRegs.ADCINTSOCSEL1.bit.SOC6 = 2;
AdcaRegs.ADCINTSOCSEL1.bit.SOC7 = 2;
//ADCINT1 will trigger second 8 SOCs
AdcaRegs.ADCINTSOCSEL2.bit.SOC8 = 1;
AdcaRegs.ADCINTSOCSEL2.bit.SOC9 = 1;
AdcaRegs.ADCINTSOCSEL2.bit.SOC10 = 1;
AdcaRegs.ADCINTSOCSEL2.bit.SOC11 = 1;
AdcaRegs.ADCINTSOCSEL2.bit.SOC12 = 1;
AdcaRegs.ADCINTSOCSEL2.bit.SOC13 = 1;
AdcaRegs.ADCINTSOCSEL2.bit.SOC14 = 1;
AdcaRegs.ADCINTSOCSEL2.bit.SOC15 = 1;
}
//===========================================================================
// No more.
//===========================================================================
Any tips or advice at all would be appreciated. Thank you!
Austin Allen
