Part Number: TMS320F280049C
Other Parts Discussed in Thread: DRV8320
SDK Lab guide leaves out some very important details of 5.1 settings being prerequisite. My motor got really hot after auto ID and 1st run. SDK has default 20Hz preset for full scale frequency. So how anyone know that was intended if they don't dig several guides looking for 5.1 info or burn up motor!
How are we to know 20 Hz is intended or required full scale frequency for InstaSpin motor auto ID? Also prior to auto ID all 3 motor phases are on full +Vbus level and very dangerous for HV motors. It is industry best practice to keep phase voltages OFF during idle time, why TI engineers not fowling best accepted practice?
5.1
Software Prerequisites
Below are the parameters that require configuration by in the user's software to manage the motor signals
required by InstaSPIN's FAST observer. Each parameter is discussed in this section.
• IQ full-scale frequency - set to motor's max electrical frequency with 20-30% headroom
• IQ full-scale voltage - set to motor's max voltage with 20-30% headroom
• IQ full-scale current - set to motor's max measurable current with 20-30% headroom
• Max Current - set to motor manufacturer's max current (peak) with 0% headroom
• Decimation rates - multiple loop rates and settings
• System Frequency - set to MCU's max CPU clock speed
• PWM Frequency - default is 20 KHz, increase with lower inductance motors
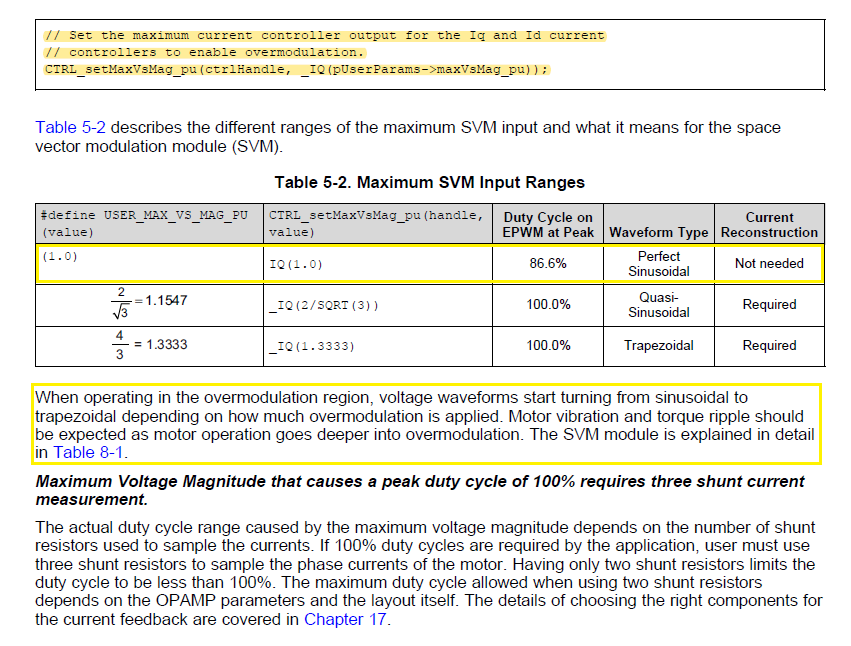
• Max Duty Cycle - 100% duty use 3-shunt current measurements
Below user parameters SDK mentions to preset in user.h no others:
A few values can already be populated in “user.h” before motor parameter identification.
USER_MOTOR_TYPE = MOTOR_TYPE_PM or MOTOR_TYPE_INDUCTION Motor type must be known and entered in this parameter.
USER_MOTOR_NUM_POLE_PAIRS Number of pole pairs of the motor
USER_MOTOR_MAX_CURRENT Maximum nameplate current of the motor
USER_MOTOR_RES_EST_CURRENT The motor will have to initially be started in open loop during identification. This value sets the peak of the current used during initial startup of the motor. If the motor has high cogging torque or some kind of load, increase this current value until the motor will start spinning. After motor identification, this value is never used.
USER_MOTOR_IND_EST_CURRENT Must be zero for ACIM motors. For PMSM motors this value can be set to the negative of the current used for USER_MOTOR_RES_EST_CURRENT. For example, if USER_MOTOR_RES_EST_CURRENT is 1.0, then USER_MOTOR_IND_EST_CURRENT can be -1.0.
USER_MOTOR_NUM_POLE_PAIRS Number of pole pairs of the motor
USER_MOTOR_RATED_FLUX Must be zero for PMSM motors. For ACIM motors the rated flux should be set to nameplate values calculated as follows:
USER_MOTOR_RATED_FLUX = SQRT(2)/SQRT(3)*Rated_VAC/Rated_F So for a 220VAC motor with a rated frequency of 60 Hz, then the rated flux would be:
USER_MOTOR_RATED_FLUX = SQRT(2)/SQRT(3)*220.0/60.0 = 2.9938
USER_MOTOR_FLUX_EST_FREQ_Hz A starting point for this frequency if the motor is a PMSM motor is 20.0 Hz, and if it is an ACIM motor, a good starting point is 5.0 Hz.