I started to develop my project on F28027F but because of lack of pins i moved to f28069F family with fpu. At the beginning the project was created using IQ but i decided to use floating point because it is available.
In the properties i have enabled: --float_suport=fpu32, Runtimesupport library: rts2800_fpu32.lib and in the file search patch rts2800_fpu32.lib is inluded. Also changed to floating point both libs: 2806xRevB_FastSpinROMSymbols_fpu32.lib and IQmath_fpu32.lib
I use eeprom to save motor parameters so i declared two function based on original but without using almost everything from header user.h
void USER_checkForErrorsEEPROM(USER_Params *pUserParams);
void USER_setParamsFromEEPROM(USER_Params *pUserParams);
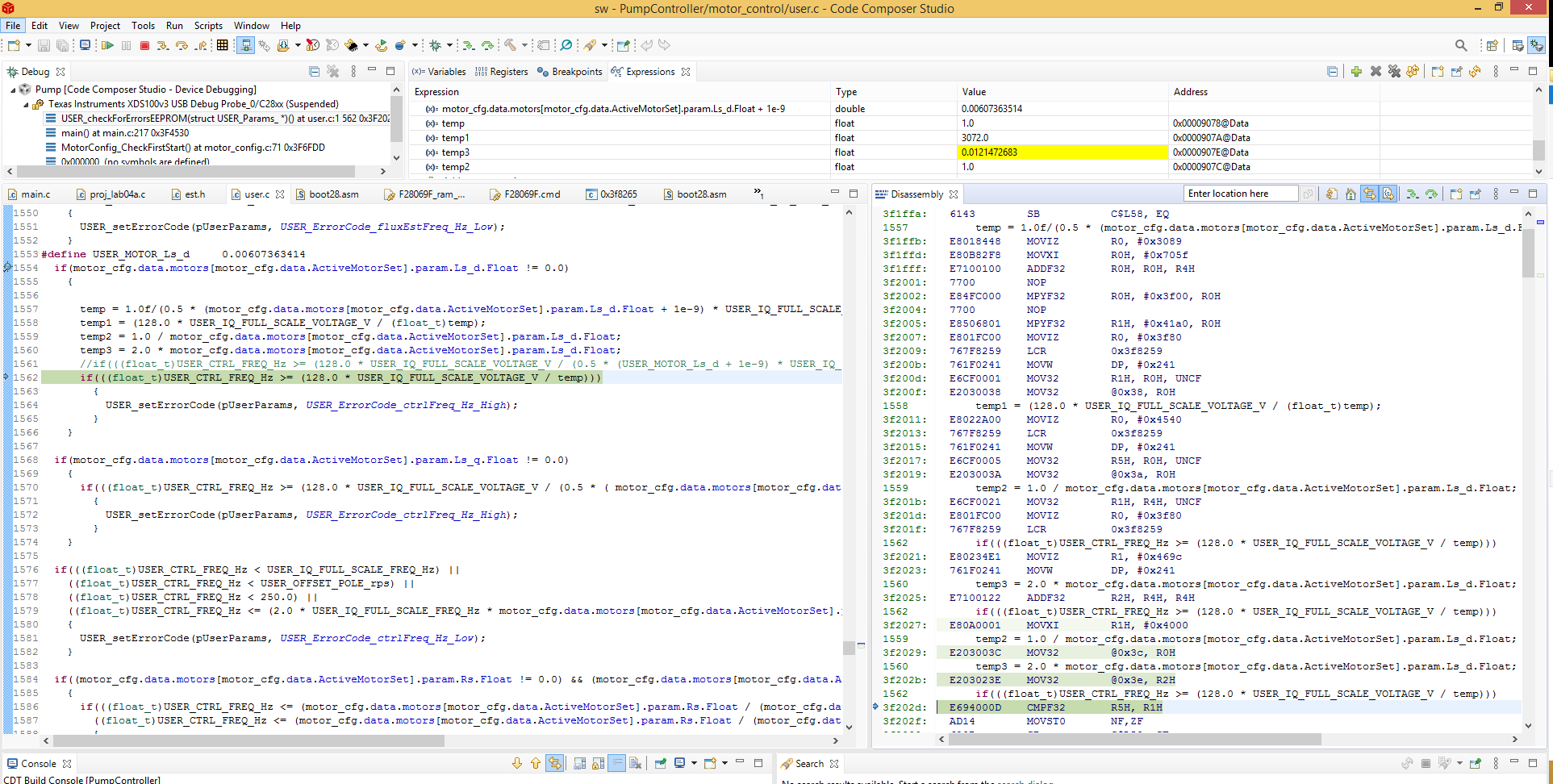
The problem is with fpu division because it returns always 0. The compiler is the newest.
motor_cfg.Ls_d.Float is floating point value, in the expression menu i can see the correct value.
temp0..3 are global vlolatile variables also ftoat_t
I get user error because the division operation is not working.
for example temp2 is set to 0. Why?
if(motor_cfg.data.motors[motor_cfg.data.ActiveMotorSet].param.Ls_d.Float != 0.0)
{
temp = 1.0f/(0.5 * (motor_cfg.data.motors[motor_cfg.data.ActiveMotorSet].param.Ls_d.Float + 1e-9) * USER_IQ_FULL_SCALE_CURRENT_A);
temp1 = (128.0 * USER_IQ_FULL_SCALE_VOLTAGE_V / (float_t)temp);
temp2 = 1.0 / motor_cfg.data.motors[motor_cfg.data.ActiveMotorSet].param.Ls_d.Float;
temp3 = 2.0 * motor_cfg.data.motors[motor_cfg.data.ActiveMotorSet].param.Ls_d.Float;
//if(((float_t)USER_CTRL_FREQ_Hz >= (128.0 * USER_IQ_FULL_SCALE_VOLTAGE_V / (0.5 * (USER_MOTOR_Ls_d + 1e-9) * USER_IQ_FULL_SCALE_CURRENT_A))))
if(((float_t)USER_CTRL_FREQ_Hz >= (128.0 * USER_IQ_FULL_SCALE_VOLTAGE_V / temp)))
{
USER_setErrorCode(pUserParams, USER_ErrorCode_ctrlFreq_Hz_High);
}
}