Tool/software: Code Composer Studio
Hello all,
I am trying to get data from a magnetic sensor (PN:AM4096) and I'm having issues with it. The code worked well with a temperature sensor on the same bus. Essencially, I get valid data during the first time, but when I try a second time, the code hangs looking for I2caRegs.I2CMDR.bit.STT flag to clear in read_bytes function.
Uint16 AM4096class::GetAbsoluteAngle(void)
{
Uint8 data[2];
int16 result = I2C_SUCCESS;
AM4096class::SetRegisterAddress(32);
result = I2C.read_bytes((AM4096_ADDRESS_CODE | (AM4096class::Address)) , sizeof(data), data);
AM4096class::DATA_union.DATA_Registers.DATA_ADDR_33.all = data[1]<<8+data[0];
return result;
}
Uint16 I2Cclass::read_bytes(Uint16 slave_address, Uint16 count, Uint8 *out)
{
Uint16 i, ret;
GpioDataRegs.GPADAT.bit.GPIO21 = 0;
I2Cclass::start(slave_address);
GpioDataRegs.GPADAT.bit.GPIO21 = 1;
// issue repeated start
I2caRegs.I2CMDR.bit.STT = 1;
// wait for repeated start to end
I2Cclass::timeout=0;
while (I2caRegs.I2CMDR.bit.STT != 0)
{
I2Cclass::I2Cclass::timeout++;
if(I2Cclass::I2Cclass::timeout>TIMEOUT_LIMIT)
{
return I2C_ERROR;
}
}
// non-repeat mode
I2caRegs.I2CMDR.bit.RM = 0;
// set data count
I2caRegs.I2CCNT = count;
// generate STOP condition when the data counter counts down to 0
I2caRegs.I2CMDR.bit.STP = 1;
// receiver mode
I2caRegs.I2CMDR.bit.TRX = 0;
for (i = 0; i < count; ++i)
{
// wait until the data receive register is ready to be read
I2Cclass::timeout=0;
while (I2caRegs.I2CSTR.bit.RRDY != 1)
{
I2Cclass::timeout++;
if(I2Cclass::timeout>TIMEOUT_LIMIT)
return I2C_ERROR;
}
out[i] = I2caRegs.I2CDRR;
}
return I2C_SUCCESS;
}
Uint16 I2Cclass::start(Uint16 slave_address)
{
// load slave address
I2caRegs.I2CSAR = slave_address;
// wait for STOP condition
I2Cclass::timeout=0;
while (I2caRegs.I2CMDR.bit.STP != 0)
{
I2Cclass::timeout++;
if(I2Cclass::timeout>TIMEOUT_LIMIT)
return I2C_ERROR;
}
// master mode
I2caRegs.I2CMDR.bit.MST = 1;
// generate START condition
I2caRegs.I2CMDR.bit.STT = 1;
return I2C_SUCCESS;
}
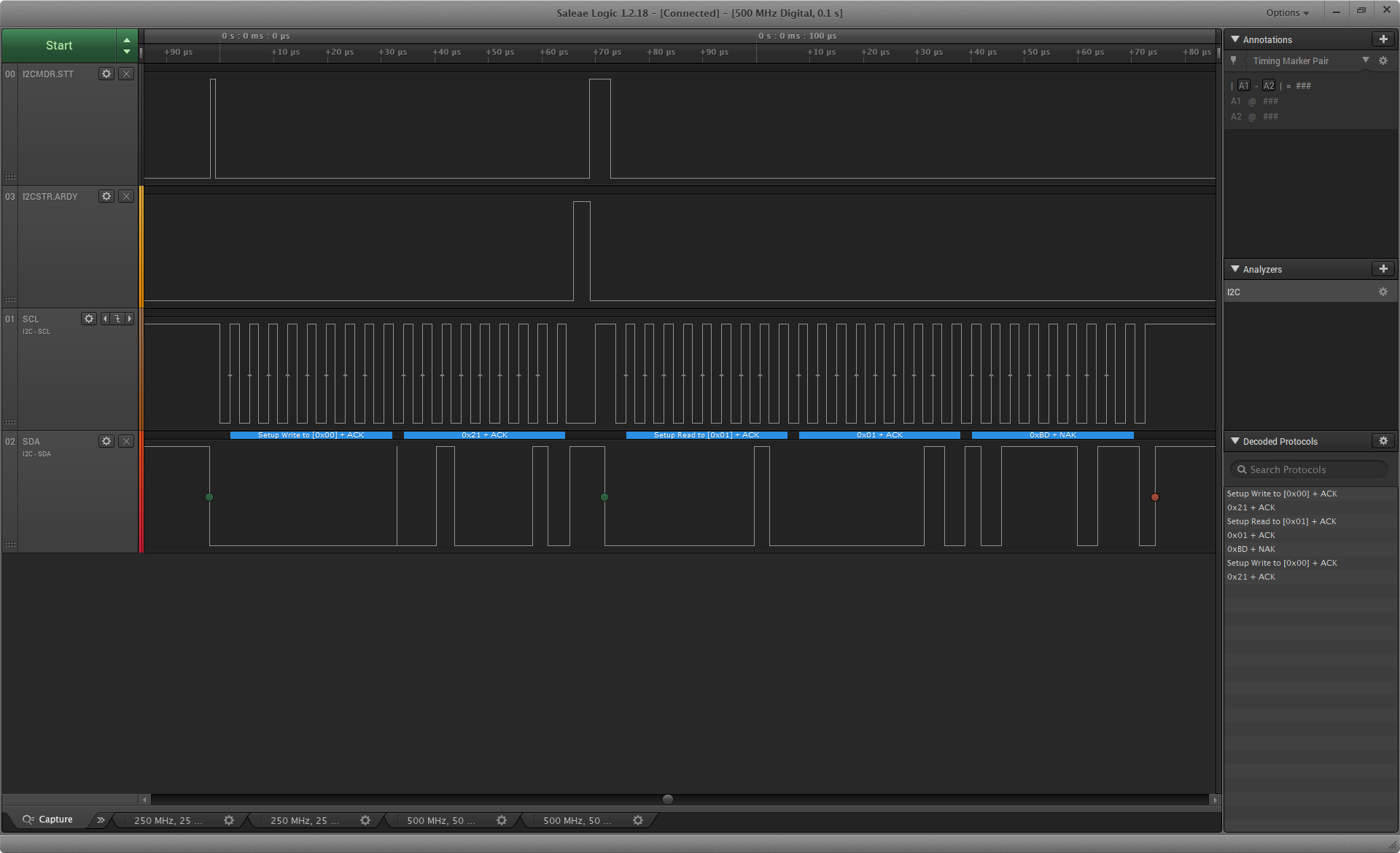
This picture below is the first request. It returns the correct value.
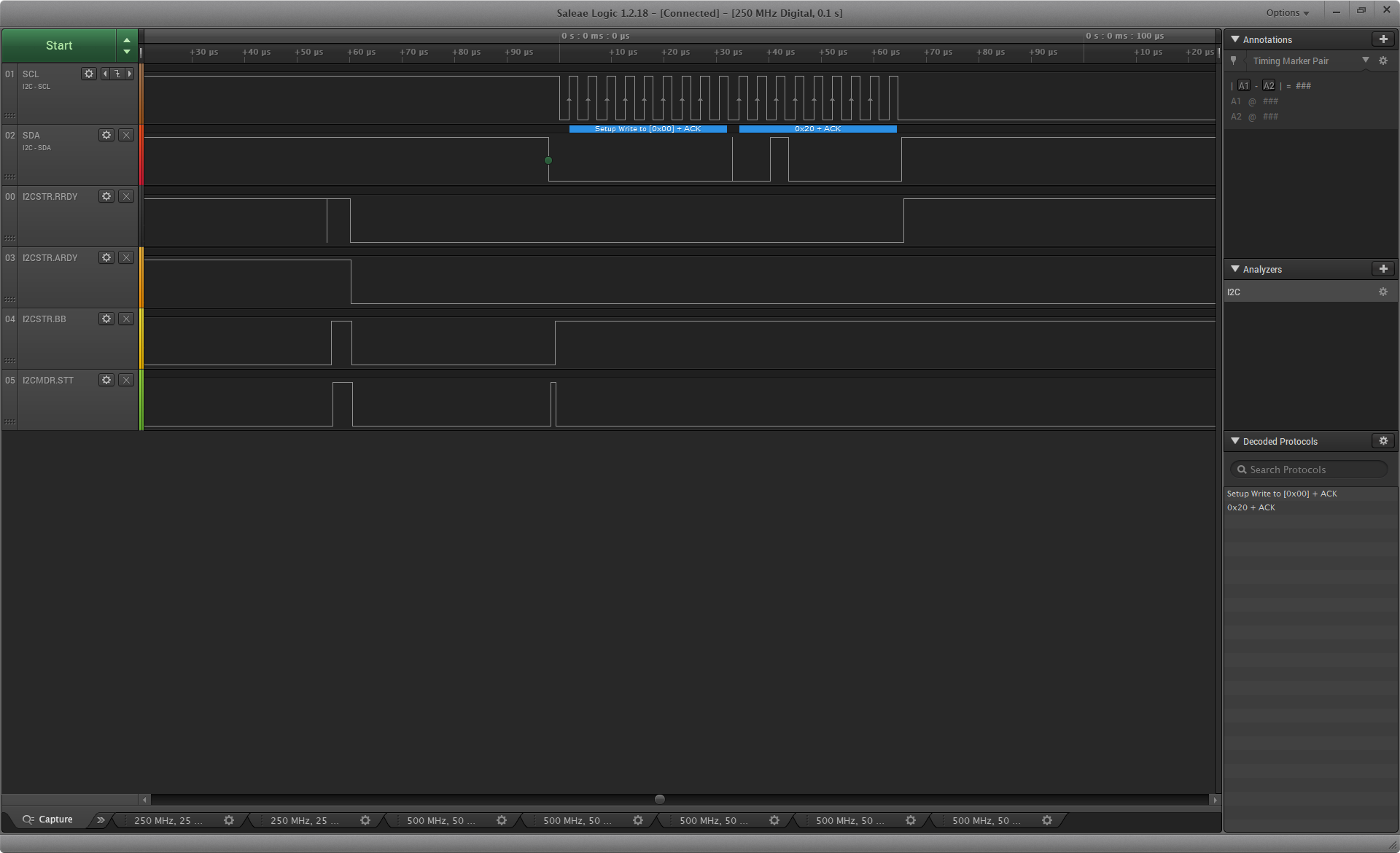
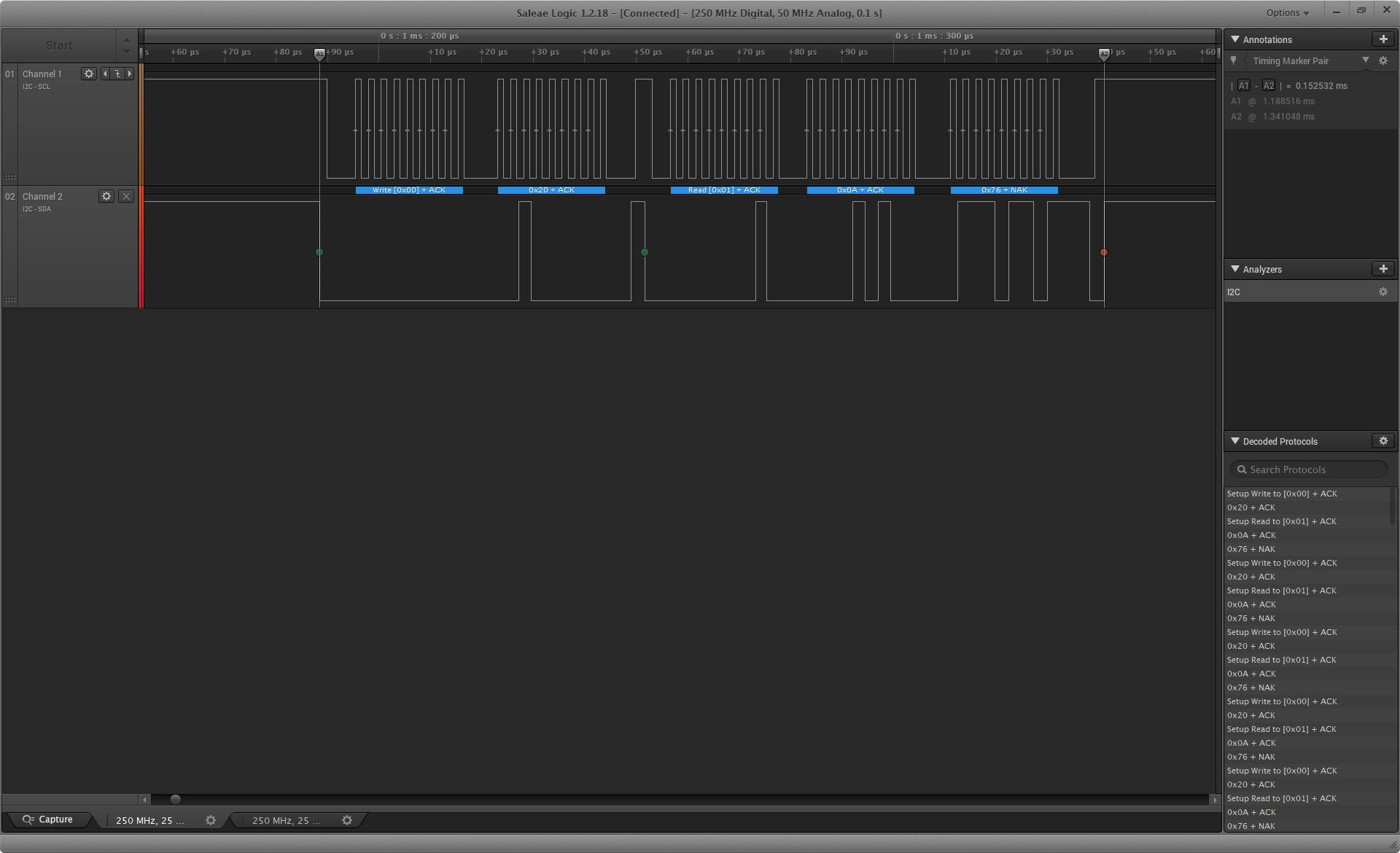
This second image shows the I2C bus hanging. It's able to send the slave and register address.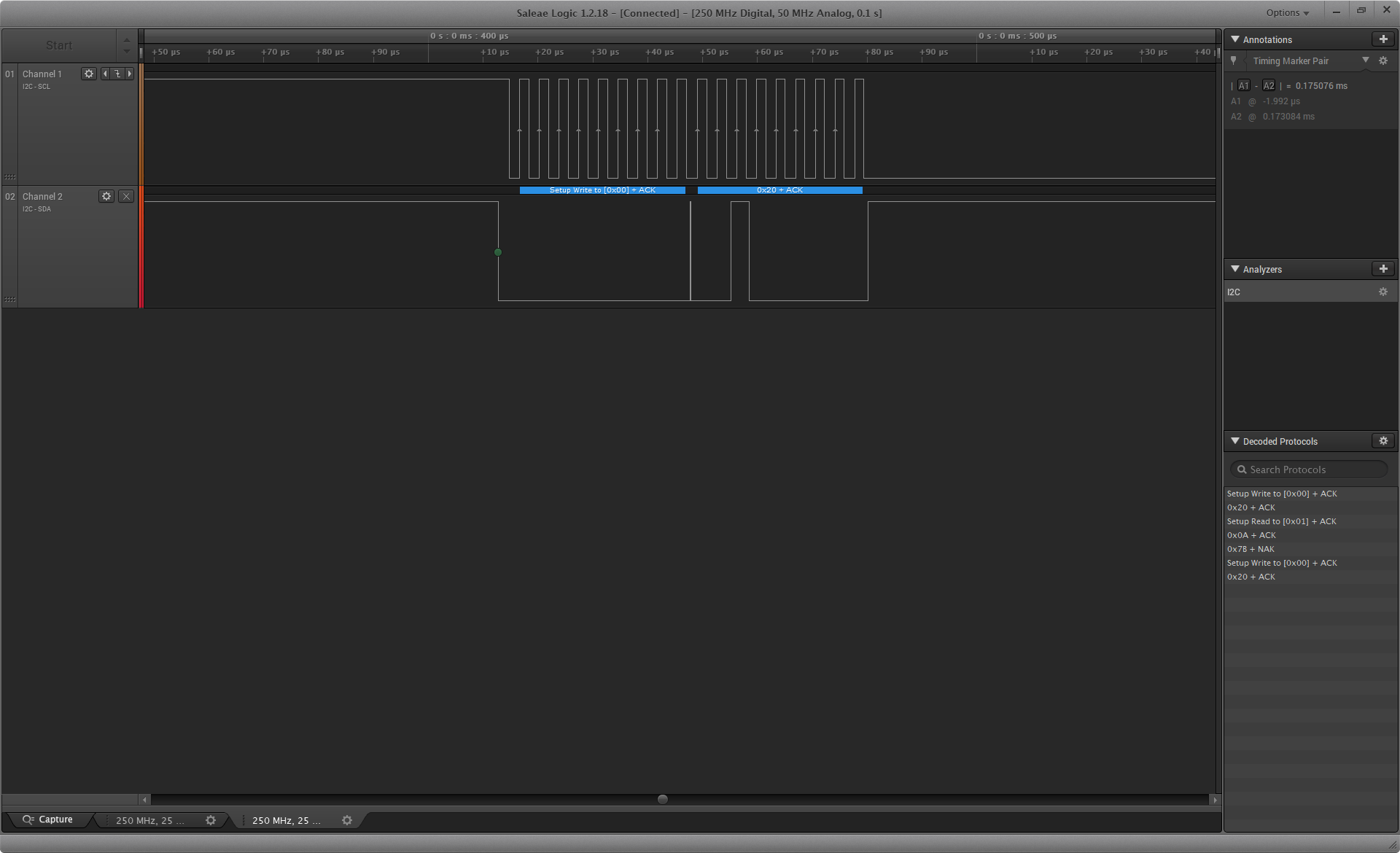
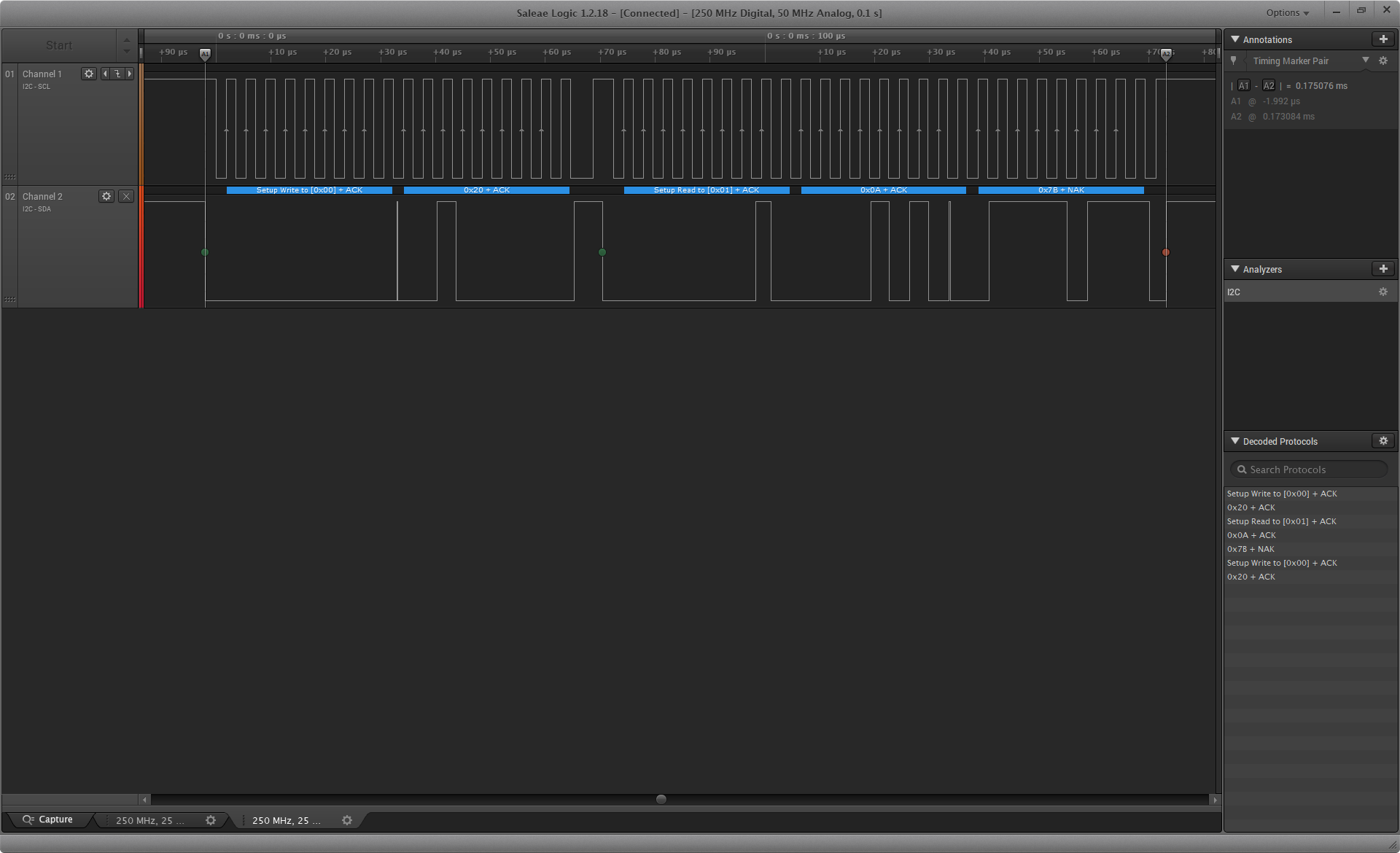
This image is when running the sensor from an arduino. It works every time.
Could someone please shine some light on this? Thank you!