Part Number: TMS320F28377D
Other Parts Discussed in Thread: C2000WARE
Tool/software: Code Composer Studio
Excuse me, I have some problems in debugging CAN communication recently。
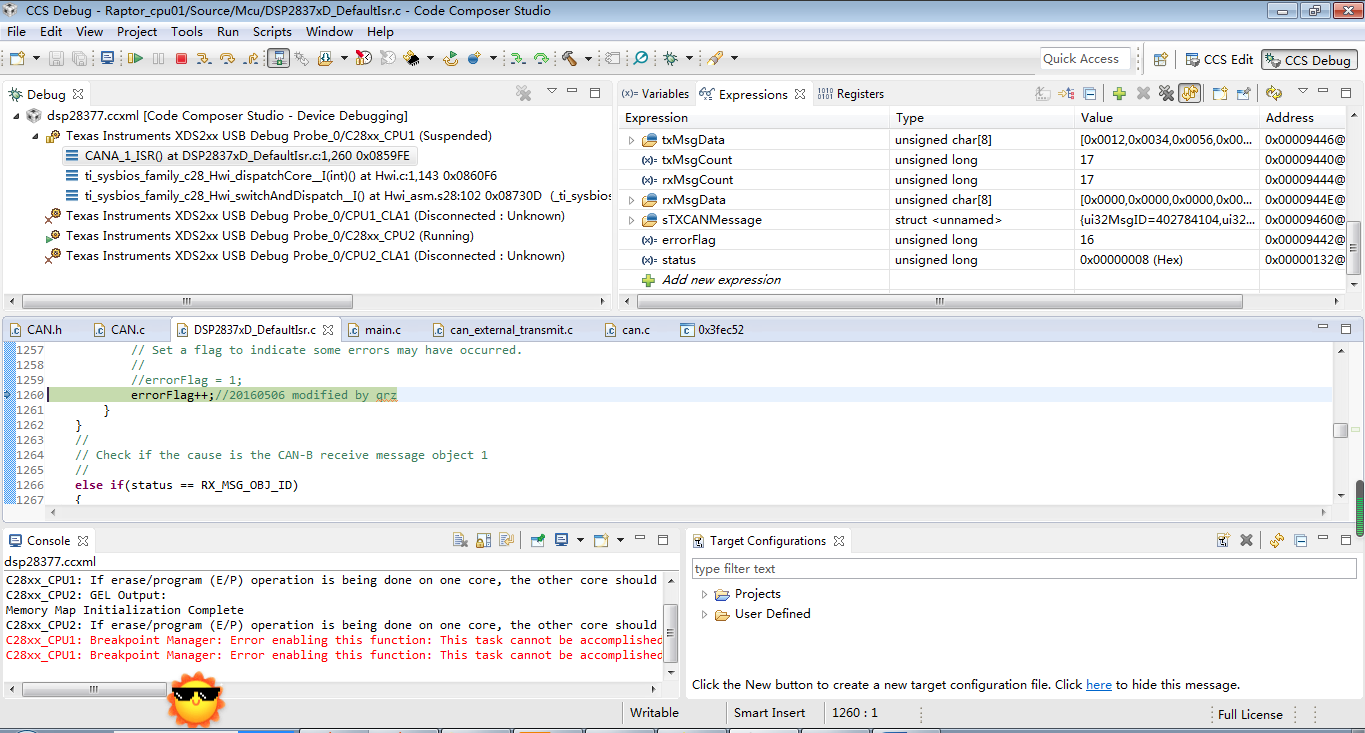
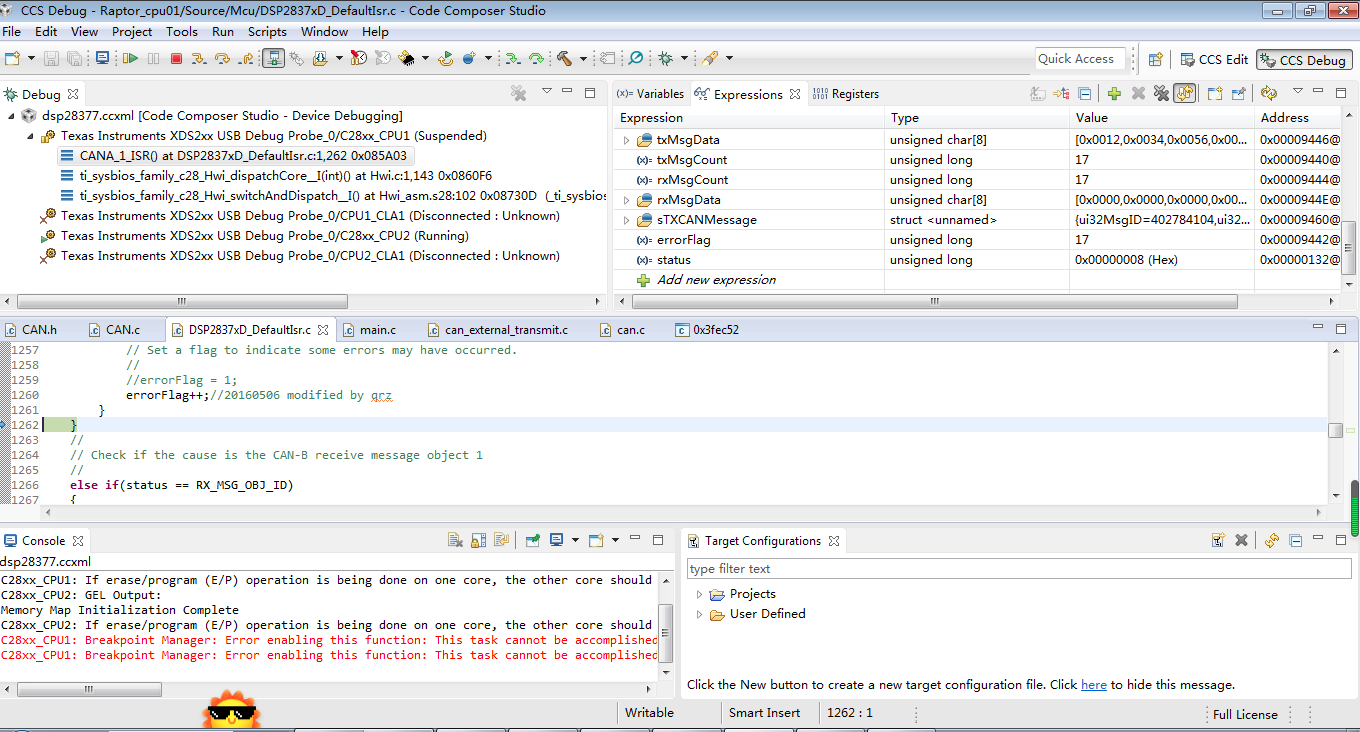
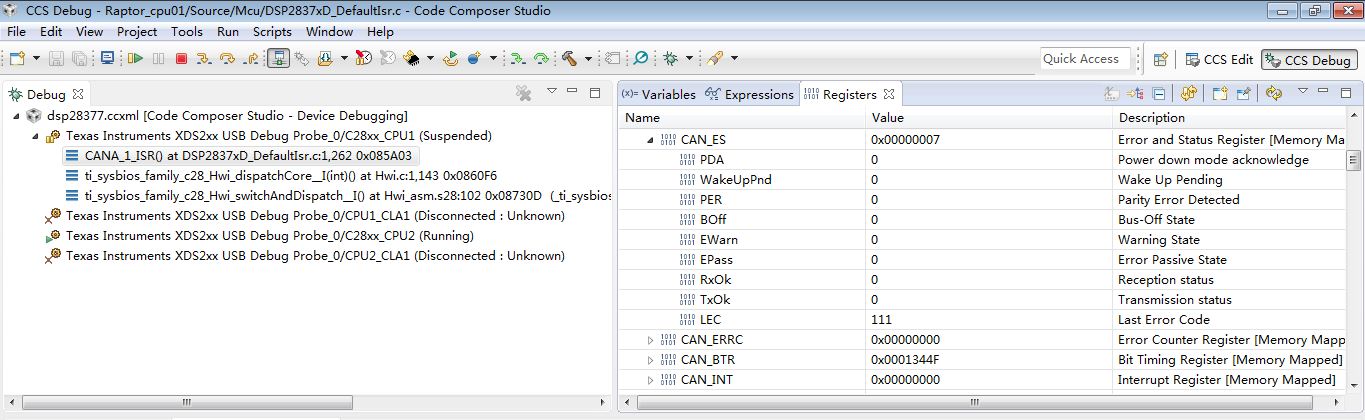
First,I used TMS320F28377D Code Examples/All CPU1 Examples / can_external_transmit to debug CAN and define TX_MSG_OBJ_ID 2; RX_MSG_OBJ_ID 1。I can receive message and retransmit the message, but encounter some ploblems. As Figure 1-3 shows,
status = CANIntStatus(CANA_BASE, CAN_INT_STS_CAUSE); àstatus = 0x00008000
status = CANStatusGet(CANA_BASE, CAN_STS_CONTROL); à status = 0x00000008
How can I deal with the proplems and Why ?
Second, I can receive message for specific ID(0x00005555). But if I want to receive all messages first, and then judge ID Whether is used. How Can I configure the sRXCANMessage structure?
sRXCANMessage.ui32MsgID = 0x00005555;
sRXCANMessage.ui32MsgIDMask = 0;
sRXCANMessage.ui32Flags = MSG_OBJ_RX_INT_ENABLE;
sRXCANMessage.ui32MsgLen = MSG_DATA_LENGTH;
sRXCANMessage.pucMsgData = rxMsgData;
CANMessageSet(CANA_BASE, RX_MSG_OBJ_ID, &sRXCANMessage,
MSG_OBJ_TYPE_RX);
Thank you very much!
Best Regards.