Other Parts Discussed in Thread: TMS320F28069, MOTORWARE, C2000WARE
Hello,
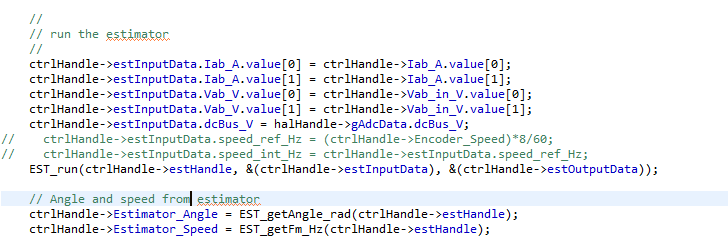
We have some software that makes use of Instaspin for sensorless motor control for the TMS320F28069 microcontroller (which was based on an old motorware example project). We have been recently moving all of the firmware to the newer TMS320F28049C because of the new features and safety libraries. I have so far managed to get most of the code working, however the sensorless estimator seems not to want to work. Not that is not estimating correctly, it's simply that as soon as I uncomment the function "EST_run" the microcontroller crashes and jumps to "Interrupt_illegalOperationHandler". Why would this happen? Could you please specify which are the functions needed to get the FAST observer working? That is the only part that we use from Instaspin (we don't need the motor identification, etc.).
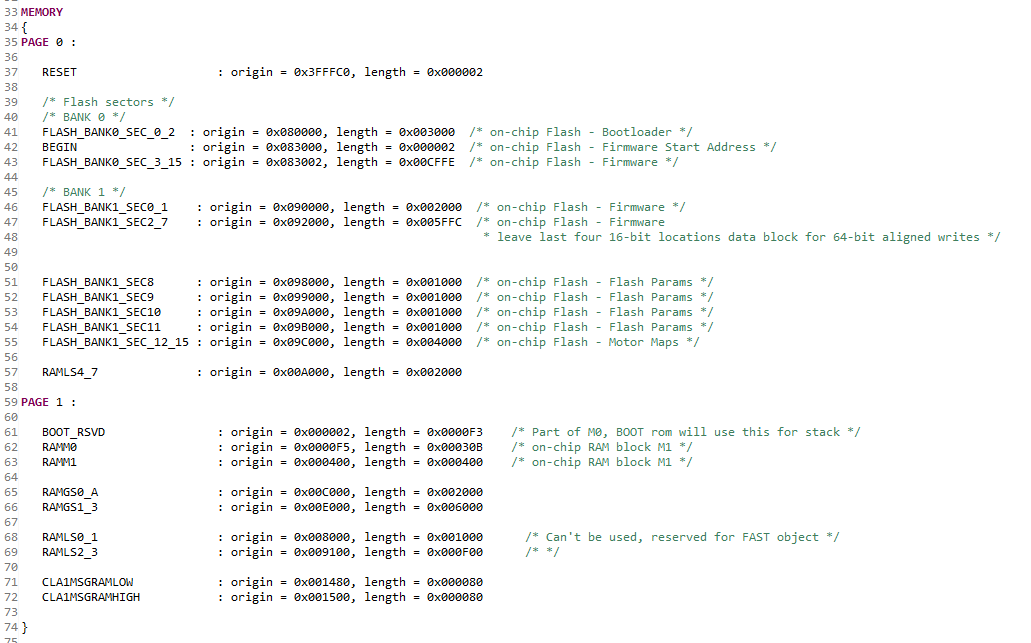
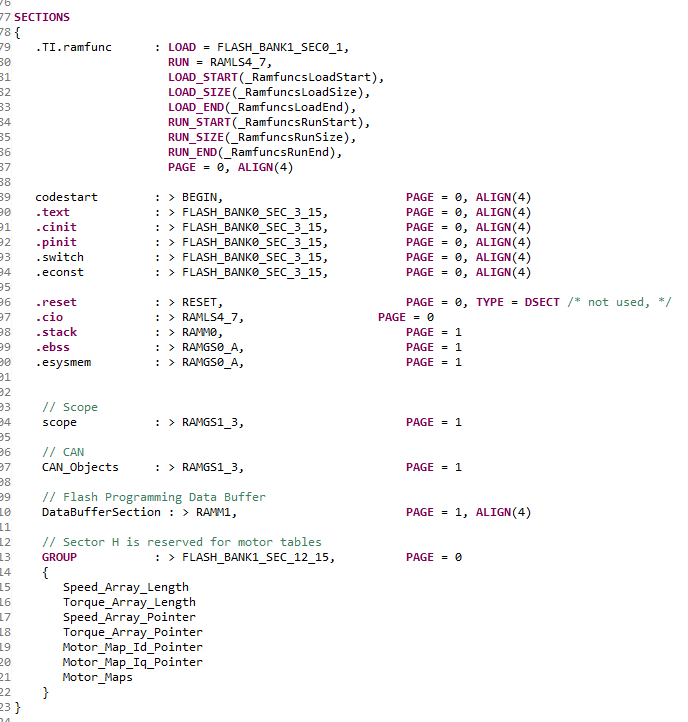
I have included the library "f28004x_fast_rom_symbols_fpu32.lib" and I have had a look to the C2000ware_Motor_Control example projects but I haven't managed to find out the root of the problem. Another interesting effect is that as soon as I include the file "est.h" and try to compile I get the error "identifier CTRL_Handle is undefined" in 2 functions of that file "EST_setupTraj" and "EST_configureCtrl", despite the fact that I have: #include "ctrl_obj.h" in the includes. If I simply comment out those two functions then I compile fine but as said previously the program crashes when I uncomment "EST_run".
Any ideas?