Other Parts Discussed in Thread: DRV8353, , DRV8353RS-EVM
Hi,
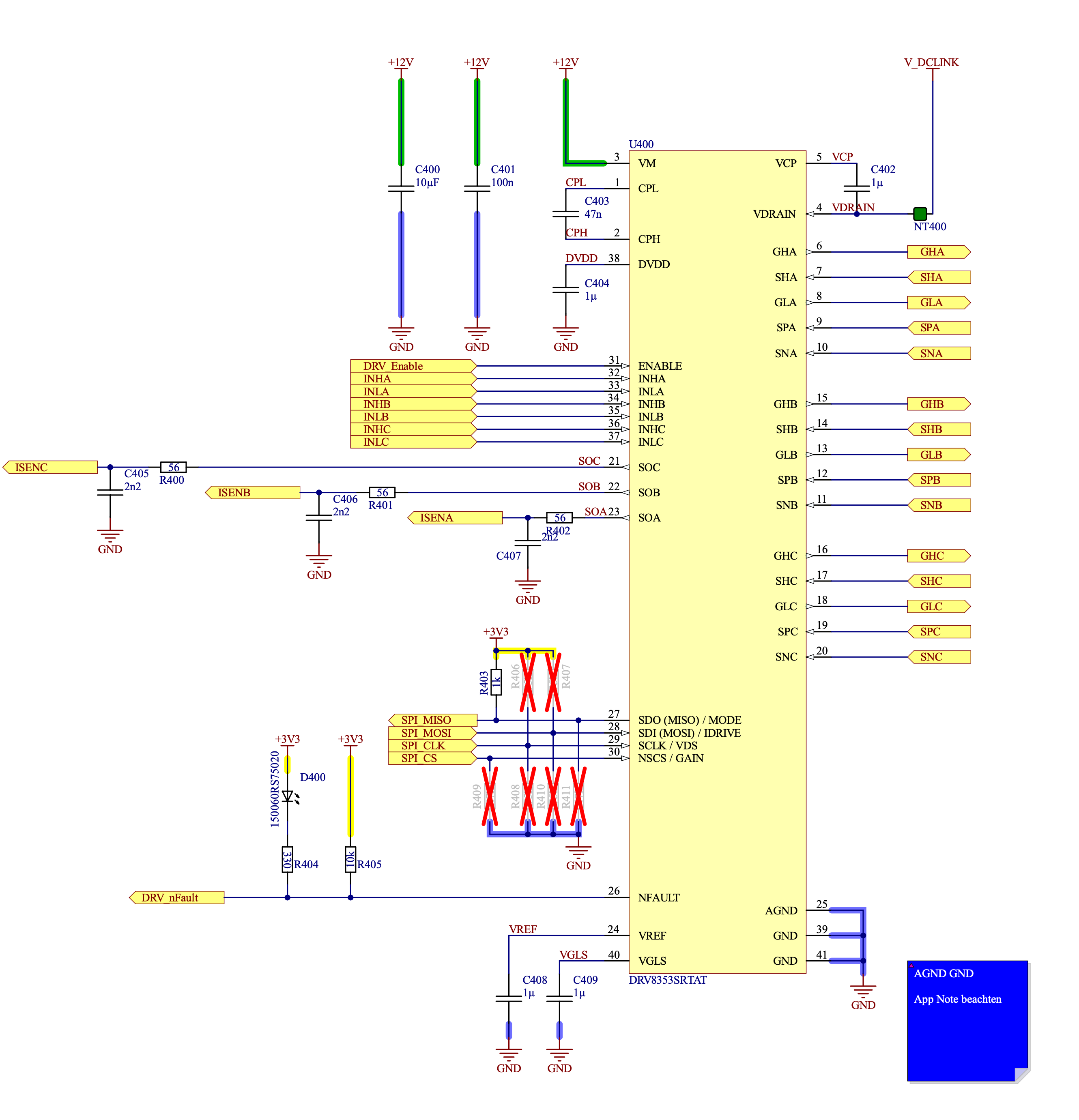
I have a weird problem. I did my own hardware, based on an evaluation board. I'm using F28069F and DRV8353S.
It is based on the DRV8353-EVM board.
But I can't get it working with lab02a, every time it tries to identify the motor, it fails.
What is happening?
RoverL - motor not spinning, but a noisy tone. Then it switches to EST_State_RS, motor start spinning for half a second or so and then a loud 'KLONK', debugging session aborts, voltage drops on supply power shortly...
I really do not know what I'm missing here...
I did change in the user.h the following:
USER_ADC_FULL_SCALE_VOLTAGE_V according to my Voltage divider (see attached schematic): (129.69) (slightly different to the EVM board, because I'm using 10k resistor instead of 9.76.
USER_ADC_FULL_SCALE_CURRENT_A (according to my Gain setting 10V/V) : 47.14 A (like DRV8353 EVM)
USER_VOLTAGE_FILTER_POLE_Hz according to my HW --> 347.49
Although I was so desperate, that I tried the modified project 05b from the evaluation board (which TI is providing) and motor does spin, but only when I disable Motor identification and I had to double the USER_ADC_FULL_SCALE_CURRENT_A to 94.28A value, but it is not correct then, but this would be not correct for my hardware. I disabled the PWMDataWrite and put 1A over the shunt resistor and I was able to see, that then the corresponding value in A was 2A instead of 1A. When I put it back to the correct value of 47.14A, then I see 1A when I apply 1A, motor does spin, but horribly. Motor makes a lot of noise. And as I said Motor Identification does not work regardless which current setting value.
this is my calculation for getting it back from the pu values:
gMotorVars.I_1_A = _IQmpy(gAdcData.I.value[0], _IQ(USER_IQ_FULL_SCALE_CURRENT_A)); gMotorVars.I_2_A = _IQmpy(gAdcData.I.value[1], _IQ(USER_IQ_FULL_SCALE_CURRENT_A)); gMotorVars.I_3_A = _IQmpy(gAdcData.I.value[2], _IQ(USER_IQ_FULL_SCALE_CURRENT_A)); gMotorVars.V_1_A = _IQmpy(gAdcData.V.value[0], _IQ(USER_IQ_FULL_SCALE_VOLTAGE_V)); gMotorVars.V_2_A = _IQmpy(gAdcData.V.value[1], _IQ(USER_IQ_FULL_SCALE_VOLTAGE_V)); gMotorVars.V_3_A = _IQmpy(gAdcData.V.value[2], _IQ(USER_IQ_FULL_SCALE_VOLTAGE_V));
I checked and these values are really correct. So the measurement is ok from my point of view... What kind of other information does instaspin need ?
So, I do something miss here in the lab02b, but I do not know what...
Attached is my user.h, my project file, my hal.c,, hal.h, my drv8353.c and drv8353.h
/* --COPYRIGHT--,BSD
* Copyright (c) 2012, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file solutions/instaspin_foc/src/proj_lab02a.c
//! \brief Using InstaSPIN�FOC for the first time, Motor ID, full control system from ROM
//!
//! (C) Copyright 2011, Texas Instruments, Inc.
//! \defgroup PROJ_LAB02a PROJ_LAB02a
//@{
//! \defgroup PROJ_LAB02a_OVERVIEW Project Overview
//!
//! Using InstaSPIN�FOC for the first time, Motor ID, full control system from ROM
//!
// **************************************************************************
// the includes
// system includes
#include <math.h>
#include "main.h"
#ifdef FLASH
#pragma CODE_SECTION(mainISR,"ramfuncs");
#endif
// Include header files used in the main function
// **************************************************************************
// the defines
#define LED_BLINK_FREQ_Hz 5
// **************************************************************************
// the globals
uint_least16_t gCounter_updateGlobals = 0;
bool Flag_Latch_softwareUpdate = true;
CTRL_Handle ctrlHandle;
#ifdef CSM_ENABLE
#pragma DATA_SECTION(halHandle,"rom_accessed_data");
#endif
HAL_Handle halHandle;
#ifdef CSM_ENABLE
#pragma DATA_SECTION(gUserParams,"rom_accessed_data");
#endif
USER_Params gUserParams;
HAL_PwmData_t gPwmData = {_IQ(0.0), _IQ(0.0), _IQ(0.0)};
HAL_AdcData_t gAdcData;
_iq gMaxCurrentSlope = _IQ(0.0);
#ifdef FAST_ROM_V1p6
CTRL_Obj *controller_obj;
#else
#ifdef CSM_ENABLE
#pragma DATA_SECTION(ctrl,"rom_accessed_data");
#endif
CTRL_Obj ctrl; //v1p7 format
#endif
uint16_t gLEDcnt = 0;
volatile MOTOR_Vars_t gMotorVars = MOTOR_Vars_INIT;
#ifdef FLASH
// Used for running BackGround in flash, and ISR in RAM
extern uint16_t *RamfuncsLoadStart, *RamfuncsLoadEnd, *RamfuncsRunStart;
#ifdef CSM_ENABLE
extern uint16_t *econst_start, *econst_end, *econst_ram_load;
extern uint16_t *switch_start, *switch_end, *switch_ram_load;
#endif
#endif
#ifdef DRV8301_SPI
// Watch window interface to the 8301 SPI
DRV_SPI_8301_Vars_t gDrvSpi8301Vars;
#endif
#ifdef DRV8305_SPI
// Watch window interface to the 8305 SPI
DRV_SPI_8305_Vars_t gDrvSpi8305Vars;
#endif
#ifdef DRV8353_SPI
// Watch window interface to the 8305 SPI
DRV_SPI_8353_Vars_t gDrvSpi8353Vars;
#endif
// **************************************************************************
// the functions
void main(void)
{
uint_least8_t estNumber = 0;
#ifdef FAST_ROM_V1p6
uint_least8_t ctrlNumber = 0;
#endif
// Only used if running from FLASH
// Note that the variable FLASH is defined by the project
#ifdef FLASH
// Copy time critical code and Flash setup code to RAM
// The RamfuncsLoadStart, RamfuncsLoadEnd, and RamfuncsRunStart
// symbols are created by the linker. Refer to the linker files.
memCopy((uint16_t *)&RamfuncsLoadStart,(uint16_t *)&RamfuncsLoadEnd,(uint16_t *)&RamfuncsRunStart);
#ifdef CSM_ENABLE
//copy .econst to unsecure RAM
if(*econst_end - *econst_start)
{
memCopy((uint16_t *)&econst_start,(uint16_t *)&econst_end,(uint16_t *)&econst_ram_load);
}
//copy .switch ot unsecure RAM
if(*switch_end - *switch_start)
{
memCopy((uint16_t *)&switch_start,(uint16_t *)&switch_end,(uint16_t *)&switch_ram_load);
}
#endif
#endif
// initialize the hardware abstraction layer
halHandle = HAL_init(&hal,sizeof(hal));
// check for errors in user parameters
USER_checkForErrors(&gUserParams);
// store user parameter error in global variable
gMotorVars.UserErrorCode = USER_getErrorCode(&gUserParams);
// do not allow code execution if there is a user parameter error
if(gMotorVars.UserErrorCode != USER_ErrorCode_NoError)
{
for(;;)
{
gMotorVars.Flag_enableSys = false;
}
}
// initialize the user parameters
USER_setParams(&gUserParams);
// set the hardware abstraction layer parameters
HAL_setParams(halHandle,&gUserParams);
// initialize the controller
#ifdef FAST_ROM_V1p6
ctrlHandle = CTRL_initCtrl(ctrlNumber, estNumber); //v1p6 format (06xF and 06xM devices)
controller_obj = (CTRL_Obj *)ctrlHandle;
#else
ctrlHandle = CTRL_initCtrl(estNumber,&ctrl,sizeof(ctrl)); //v1p7 format default
#endif
{
CTRL_Version version;
// get the version number
CTRL_getVersion(ctrlHandle,&version);
gMotorVars.CtrlVersion = version;
}
// set the default controller parameters
CTRL_setParams(ctrlHandle,&gUserParams);
// setup faults
HAL_setupFaults(halHandle);
// initialize the interrupt vector table
HAL_initIntVectorTable(halHandle);
// enable the ADC interrupts
HAL_enableAdcInts(halHandle);
// enable global interrupts
HAL_enableGlobalInts(halHandle);
// enable debug interrupts
HAL_enableDebugInt(halHandle);
// disable the PWM
HAL_disablePwm(halHandle);
#ifdef DRV8301_SPI
// turn on the DRV8301 if present
HAL_enableDrv(halHandle);
// initialize the DRV8301 interface
HAL_setupDrvSpi(halHandle,&gDrvSpi8301Vars);
#endif
#ifdef DRV8305_SPI
// turn on the DRV8305 if present
HAL_enableDrv(halHandle);
// initialize the DRV8305 interface
HAL_setupDrvSpi(halHandle,&gDrvSpi8305Vars);
#endif
#ifdef DRV8353
HAL_enableDrv(halHandle);
#endif
#ifdef DRV8353_SPI
// initialize the DRV8353 interface
HAL_setupDrvSpi(halHandle,&gDrvSpi8353Vars);
#endif
// enable DC bus compensation
CTRL_setFlag_enableDcBusComp(ctrlHandle, true);
for(;;)
{
// Waiting for enable system flag to be set
while(!(gMotorVars.Flag_enableSys));
// loop while the enable system flag is true
while(gMotorVars.Flag_enableSys)
{
CTRL_Obj *obj = (CTRL_Obj *)ctrlHandle;
// increment counters
gCounter_updateGlobals++;
if(CTRL_isError(ctrlHandle))
{
// set the enable controller flag to false
CTRL_setFlag_enableCtrl(ctrlHandle,false);
// set the enable system flag to false
gMotorVars.Flag_enableSys = false;
// disable the PWM
HAL_disablePwm(halHandle);
}
else
{
// update the controller state
bool flag_ctrlStateChanged = CTRL_updateState(ctrlHandle);
// enable or disable the control
CTRL_setFlag_enableCtrl(ctrlHandle, gMotorVars.Flag_Run_Identify);
if(flag_ctrlStateChanged)
{
CTRL_State_e ctrlState = CTRL_getState(ctrlHandle);
EST_State_e estState = EST_getState(obj->estHandle);
if(ctrlState == CTRL_State_OffLine)
{
// enable the PWM
HAL_enablePwm(halHandle);
}
else if(ctrlState == CTRL_State_OnLine)
{
if((estState < EST_State_LockRotor) || (estState > EST_State_MotorIdentified))
{
// update the ADC bias values
HAL_updateAdcBias(halHandle);
}
// Return the bias value for currents
gMotorVars.I_bias.value[0] = HAL_getBias(halHandle,HAL_SensorType_Current,0);
gMotorVars.I_bias.value[1] = HAL_getBias(halHandle,HAL_SensorType_Current,1);
gMotorVars.I_bias.value[2] = HAL_getBias(halHandle,HAL_SensorType_Current,2);
// Return the bias value for voltages
gMotorVars.V_bias.value[0] = HAL_getBias(halHandle,HAL_SensorType_Voltage,0);
gMotorVars.V_bias.value[1] = HAL_getBias(halHandle,HAL_SensorType_Voltage,1);
gMotorVars.V_bias.value[2] = HAL_getBias(halHandle,HAL_SensorType_Voltage,2);
// enable the PWM
HAL_enablePwm(halHandle);
}
else if(ctrlState == CTRL_State_Idle)
{
// disable the PWM
HAL_disablePwm(halHandle);
gMotorVars.Flag_Run_Identify = false;
}
if((CTRL_getFlag_enableUserMotorParams(ctrlHandle) == true) &&
(ctrlState > CTRL_State_Idle) &&
(gMotorVars.CtrlVersion.minor == 6))
{
// call this function to fix 1p6
USER_softwareUpdate1p6(ctrlHandle);
}
}
}
if(EST_isMotorIdentified(obj->estHandle))
{
// set the current ramp
EST_setMaxCurrentSlope_pu(obj->estHandle,gMaxCurrentSlope);
gMotorVars.Flag_MotorIdentified = true;
// set the speed reference
CTRL_setSpd_ref_krpm(ctrlHandle,gMotorVars.SpeedRef_krpm);
// set the speed acceleration
CTRL_setMaxAccel_pu(ctrlHandle,_IQmpy(MAX_ACCEL_KRPMPS_SF,gMotorVars.MaxAccel_krpmps));
if(Flag_Latch_softwareUpdate)
{
Flag_Latch_softwareUpdate = false;
USER_calcPIgains(ctrlHandle);
}
}
else
{
Flag_Latch_softwareUpdate = true;
// the estimator sets the maximum current slope during identification
gMaxCurrentSlope = EST_getMaxCurrentSlope_pu(obj->estHandle);
}
// when appropriate, update the global variables
if(gCounter_updateGlobals >= NUM_MAIN_TICKS_FOR_GLOBAL_VARIABLE_UPDATE)
{
// reset the counter
gCounter_updateGlobals = 0;
updateGlobalVariables_motor(ctrlHandle);
}
// recalculate Kp and Ki gains to fix the R/L limitation of 2000.0, and Kp limit to 0.11
recalcKpKi(ctrlHandle);
if(CTRL_getMotorType(ctrlHandle) == MOTOR_Type_Induction)
{
// set electrical frequency limit to zero while identifying an induction motor
setFeLimitZero(ctrlHandle);
// calculate Dir_qFmt for acim motors
acim_Dir_qFmtCalc(ctrlHandle);
}
// enable/disable the forced angle
EST_setFlag_enableForceAngle(obj->estHandle,gMotorVars.Flag_enableForceAngle);
// enable or disable power warp
CTRL_setFlag_enablePowerWarp(ctrlHandle,gMotorVars.Flag_enablePowerWarp);
#ifdef DRV8301_SPI
HAL_writeDrvData(halHandle,&gDrvSpi8301Vars);
HAL_readDrvData(halHandle,&gDrvSpi8301Vars);
#endif
#ifdef DRV8305_SPI
HAL_writeDrvData(halHandle,&gDrvSpi8305Vars);
HAL_readDrvData(halHandle,&gDrvSpi8305Vars);
#endif
#ifdef DRV8353_SPI
HAL_writeDrvData(halHandle,&gDrvSpi8353Vars);
HAL_readDrvData(halHandle,&gDrvSpi8353Vars);
#endif
} // end of while(gFlag_enableSys) loop
// disable the PWM
HAL_disablePwm(halHandle);
// set the default controller parameters (Reset the control to re-identify the motor)
CTRL_setParams(ctrlHandle,&gUserParams);
gMotorVars.Flag_Run_Identify = false;
} // end of for(;;) loop
} // end of main() function
interrupt void mainISR(void)
{
HAL_PwmData_t negPwmData = {_IQ(0.0), _IQ(0.0), _IQ(0.0)};
// acknowledge the ADC interrupt
HAL_acqAdcInt(halHandle,ADC_IntNumber_1);
// convert the ADC data
HAL_readAdcData(halHandle,&gAdcData);
// run the controller
CTRL_run(ctrlHandle,halHandle,&gAdcData,&negPwmData);
// negate PwmData generated by SVGEN module in ROM
gPwmData.Tabc.value[0] = _IQmpy(negPwmData.Tabc.value[0], _IQ(-1.0));
gPwmData.Tabc.value[1] = _IQmpy(negPwmData.Tabc.value[1], _IQ(-1.0));
gPwmData.Tabc.value[2] = _IQmpy(negPwmData.Tabc.value[2], _IQ(-1.0));
// write the PWM compare values
HAL_writePwmData(halHandle,&gPwmData);
// setup the controller
CTRL_setup(ctrlHandle);
return;
} // end of mainISR() function
void updateGlobalVariables_motor(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
// get the speed estimate
gMotorVars.Speed_krpm = EST_getSpeed_krpm(obj->estHandle);
// get the real time speed reference coming out of the speed trajectory generator
gMotorVars.SpeedTraj_krpm = _IQmpy(CTRL_getSpd_int_ref_pu(handle),EST_get_pu_to_krpm_sf(obj->estHandle));
// get the magnetizing current
gMotorVars.MagnCurr_A = EST_getIdRated(obj->estHandle);
// get the rotor resistance
gMotorVars.Rr_Ohm = EST_getRr_Ohm(obj->estHandle);
// get the stator resistance
gMotorVars.Rs_Ohm = EST_getRs_Ohm(obj->estHandle);
// get the stator inductance in the direct coordinate direction
gMotorVars.Lsd_H = EST_getLs_d_H(obj->estHandle);
// get the stator inductance in the quadrature coordinate direction
gMotorVars.Lsq_H = EST_getLs_q_H(obj->estHandle);
// get the flux
gMotorVars.Flux_VpHz = EST_getFlux_VpHz(obj->estHandle);
// get the controller state
gMotorVars.CtrlState = CTRL_getState(handle);
// get the estimator state
gMotorVars.EstState = EST_getState(obj->estHandle);
// Get the DC buss voltage
gMotorVars.VdcBus_kV = _IQmpy(gAdcData.dcBus,_IQ(USER_IQ_FULL_SCALE_VOLTAGE_V/1000.0));
return;
} // end of updateGlobalVariables_motor() function
void recalcKpKi(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
EST_State_e EstState = EST_getState(obj->estHandle);
if((EST_isMotorIdentified(obj->estHandle) == false) && (EstState == EST_State_Rs))
{
float_t Lhf = CTRL_getLhf(handle);
float_t Rhf = CTRL_getRhf(handle);
float_t RhfoverLhf = Rhf/Lhf;
_iq Kp = _IQ(0.25*Lhf*USER_IQ_FULL_SCALE_CURRENT_A/(USER_CTRL_PERIOD_sec*USER_IQ_FULL_SCALE_VOLTAGE_V));
_iq Ki = _IQ(RhfoverLhf*USER_CTRL_PERIOD_sec);
// set Rhf/Lhf
CTRL_setRoverL(handle,RhfoverLhf);
// set the controller proportional gains
CTRL_setKp(handle,CTRL_Type_PID_Id,Kp);
CTRL_setKp(handle,CTRL_Type_PID_Iq,Kp);
// set the Id controller gains
CTRL_setKi(handle,CTRL_Type_PID_Id,Ki);
PID_setKi(obj->pidHandle_Id,Ki);
// set the Iq controller gains
CTRL_setKi(handle,CTRL_Type_PID_Iq,Ki);
PID_setKi(obj->pidHandle_Iq,Ki);
}
return;
} // end of recalcKpKi() function
void setFeLimitZero(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
EST_State_e EstState = EST_getState(obj->estHandle);
_iq fe_neg_max_pu;
_iq fe_pos_min_pu;
if((EST_isMotorIdentified(obj->estHandle) == false) && (CTRL_getMotorType(handle) == MOTOR_Type_Induction))
{
fe_neg_max_pu = _IQ30(0.0);
fe_pos_min_pu = _IQ30(0.0);
}
else
{
fe_neg_max_pu = _IQ30(-USER_ZEROSPEEDLIMIT);
fe_pos_min_pu = _IQ30(USER_ZEROSPEEDLIMIT);
}
EST_setFe_neg_max_pu(obj->estHandle, fe_neg_max_pu);
EST_setFe_pos_min_pu(obj->estHandle, fe_pos_min_pu);
return;
} // end of setFeLimitZero() function
void acim_Dir_qFmtCalc(CTRL_Handle handle)
{
CTRL_Obj *obj = (CTRL_Obj *)handle;
EST_State_e EstState = EST_getState(obj->estHandle);
if(EstState == EST_State_IdRated)
{
EST_setDir_qFmt(obj->estHandle, EST_computeDirection_qFmt(obj->estHandle, 0.7));
}
return;
} // end of acim_Dir_qFmtCalc() function
//@} //defgroup
// end of file
/* --COPYRIGHT--,BSD
* Copyright (c) 2012, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file solutions/instaspin_foc/boards/drv8301kit_revD/f28x/f2806xF/src/hal.c
//! \brief Contains the various functions related to the HAL object (everything outside the CTRL system)
//!
//! (C) Copyright 2011, Texas Instruments, Inc.
// **************************************************************************
// the includes
// drivers
// modules
// platforms
#include "hal.h"
#include "user.h"
#include "hal_obj.h"
#ifdef FLASH
#pragma CODE_SECTION(HAL_setupFlash,"ramfuncs");
#endif
// **************************************************************************
// the defines
#define US_TO_CNT(A) ((((long double) A * (long double)USER_SYSTEM_FREQ_MHz) - 9.0L) / 5.0L)
// **************************************************************************
// the globals
HAL_Obj hal;
// **************************************************************************
// the functions
void HAL_cal(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// enable the ADC clock
CLK_enableAdcClock(obj->clkHandle);
// Run the Device_cal() function
// This function copies the ADC and oscillator calibration values from TI reserved
// OTP into the appropriate trim registers
// This boot ROM automatically calls this function to calibrate the interal
// oscillators and ADC with device specific calibration data.
// If the boot ROM is bypassed by Code Composer Studio during the development process,
// then the calibration must be initialized by the application
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
(*Device_cal)();
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
// run offsets calibration in user's memory
HAL_AdcOffsetSelfCal(handle);
// run oscillator compensation
HAL_OscTempComp(handle);
// disable the ADC clock
CLK_disableAdcClock(obj->clkHandle);
return;
} // end of HAL_cal() function
void HAL_OscTempComp(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint16_t Temperature;
// disable the ADCs
ADC_disable(obj->adcHandle);
// power up the bandgap circuit
ADC_enableBandGap(obj->adcHandle);
// set the ADC voltage reference source to internal
ADC_setVoltRefSrc(obj->adcHandle,ADC_VoltageRefSrc_Int);
// enable the ADC reference buffers
ADC_enableRefBuffers(obj->adcHandle);
// Set main clock scaling factor (max45MHz clock for the ADC module)
ADC_setDivideSelect(obj->adcHandle,ADC_DivideSelect_ClkIn_by_2);
// power up the ADCs
ADC_powerUp(obj->adcHandle);
// enable the ADCs
ADC_enable(obj->adcHandle);
// enable non-overlap mode
ADC_enableNoOverlapMode(obj->adcHandle);
// connect channel A5 internally to the temperature sensor
ADC_setTempSensorSrc(obj->adcHandle, ADC_TempSensorSrc_Int);
// set SOC0 channel select to ADCINA5
ADC_setSocChanNumber(obj->adcHandle, ADC_SocNumber_0, ADC_SocChanNumber_A5);
// set SOC0 acquisition period to 26 ADCCLK
ADC_setSocSampleDelay(obj->adcHandle, ADC_SocNumber_0, ADC_SocSampleDelay_64_cycles);
// connect ADCINT1 to EOC0
ADC_setIntSrc(obj->adcHandle, ADC_IntNumber_1, ADC_IntSrc_EOC0);
// clear ADCINT1 flag
ADC_clearIntFlag(obj->adcHandle, ADC_IntNumber_1);
// enable ADCINT1
ADC_enableInt(obj->adcHandle, ADC_IntNumber_1);
// force start of conversion on SOC0
ADC_setSocFrc(obj->adcHandle, ADC_SocFrc_0);
// wait for end of conversion
while (ADC_getIntFlag(obj->adcHandle, ADC_IntNumber_1) == 0){}
// clear ADCINT1 flag
ADC_clearIntFlag(obj->adcHandle, ADC_IntNumber_1);
Temperature = ADC_readResult(obj->adcHandle, ADC_ResultNumber_0);
HAL_osc1Comp(handle, Temperature);
HAL_osc2Comp(handle, Temperature);
return;
} // end of HAL_OscTempComp() function
void HAL_osc1Comp(HAL_Handle handle, const int16_t sensorSample)
{
int16_t compOscFineTrim;
HAL_Obj *obj = (HAL_Obj *)handle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
compOscFineTrim = ((sensorSample - getRefTempOffset())*(int32_t)getOsc1FineTrimSlope()
+ OSC_POSTRIM_OFF + FP_ROUND )/FP_SCALE + getOsc1FineTrimOffset() - OSC_POSTRIM;
if(compOscFineTrim > 31)
{
compOscFineTrim = 31;
}
else if(compOscFineTrim < -31)
{
compOscFineTrim = -31;
}
OSC_setTrim(obj->oscHandle, OSC_Number_1, HAL_getOscTrimValue(getOsc1CoarseTrim(), compOscFineTrim));
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of HAL_osc1Comp() function
void HAL_osc2Comp(HAL_Handle handle, const int16_t sensorSample)
{
int16_t compOscFineTrim;
HAL_Obj *obj = (HAL_Obj *)handle;
ENABLE_PROTECTED_REGISTER_WRITE_MODE;
compOscFineTrim = ((sensorSample - getRefTempOffset())*(int32_t)getOsc2FineTrimSlope()
+ OSC_POSTRIM_OFF + FP_ROUND )/FP_SCALE + getOsc2FineTrimOffset() - OSC_POSTRIM;
if(compOscFineTrim > 31)
{
compOscFineTrim = 31;
}
else if(compOscFineTrim < -31)
{
compOscFineTrim = -31;
}
OSC_setTrim(obj->oscHandle, OSC_Number_2, HAL_getOscTrimValue(getOsc2CoarseTrim(), compOscFineTrim));
DISABLE_PROTECTED_REGISTER_WRITE_MODE;
return;
} // end of HAL_osc2Comp() function
uint16_t HAL_getOscTrimValue(int16_t coarse, int16_t fine)
{
uint16_t regValue = 0;
if(fine < 0)
{
regValue = ((-fine) | 0x20) << 9;
}
else
{
regValue = fine << 9;
}
if(coarse < 0)
{
regValue |= ((-coarse) | 0x80);
}
else
{
regValue |= coarse;
}
return regValue;
} // end of HAL_getOscTrimValue() function
void HAL_AdcOffsetSelfCal(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint16_t AdcConvMean;
// disable the ADCs
ADC_disable(obj->adcHandle);
// power up the bandgap circuit
ADC_enableBandGap(obj->adcHandle);
// set the ADC voltage reference source to internal
ADC_setVoltRefSrc(obj->adcHandle,ADC_VoltageRefSrc_Int);
// enable the ADC reference buffers
ADC_enableRefBuffers(obj->adcHandle);
// Set main clock scaling factor (max45MHz clock for the ADC module)
ADC_setDivideSelect(obj->adcHandle,ADC_DivideSelect_ClkIn_by_2);
// power up the ADCs
ADC_powerUp(obj->adcHandle);
// enable the ADCs
ADC_enable(obj->adcHandle);
//Select VREFLO internal connection on B5
ADC_enableVoltRefLoConv(obj->adcHandle);
//Select channel B5 for all SOC
HAL_AdcCalChanSelect(handle, ADC_SocChanNumber_B5);
//Apply artificial offset (+80) to account for a negative offset that may reside in the ADC core
ADC_setOffTrim(obj->adcHandle, 80);
//Capture ADC conversion on VREFLO
AdcConvMean = HAL_AdcCalConversion(handle);
//Set offtrim register with new value (i.e remove artical offset (+80) and create a two's compliment of the offset error)
ADC_setOffTrim(obj->adcHandle, 80 - AdcConvMean);
//Select external ADCIN5 input pin on B5
ADC_disableVoltRefLoConv(obj->adcHandle);
return;
} // end of HAL_AdcOffsetSelfCal() function
void HAL_AdcCalChanSelect(HAL_Handle handle, const ADC_SocChanNumber_e chanNumber)
{
HAL_Obj *obj = (HAL_Obj *)handle;
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_0,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_1,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_2,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_3,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_4,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_5,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_6,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_7,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_8,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_9,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_10,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_11,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_12,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_13,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_14,chanNumber);
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_15,chanNumber);
return;
} // end of HAL_AdcCalChanSelect() function
uint16_t HAL_AdcCalConversion(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint16_t index, SampleSize, Mean;
uint32_t Sum;
ADC_SocSampleDelay_e ACQPS_Value;
index = 0; //initialize index to 0
SampleSize = 256; //set sample size to 256 (**NOTE: Sample size must be multiples of 2^x where is an integer >= 4)
Sum = 0; //set sum to 0
Mean = 999; //initialize mean to known value
//Set the ADC sample window to the desired value (Sample window = ACQPS + 1)
ACQPS_Value = ADC_SocSampleDelay_7_cycles;
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_0,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_1,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_2,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_3,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_4,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_5,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_6,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_7,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_8,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_9,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_10,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_11,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_12,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_13,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_14,ACQPS_Value);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_15,ACQPS_Value);
// Enabled ADCINT1 and ADCINT2
ADC_enableInt(obj->adcHandle, ADC_IntNumber_1);
ADC_enableInt(obj->adcHandle, ADC_IntNumber_2);
// Disable continuous sampling for ADCINT1 and ADCINT2
ADC_setIntMode(obj->adcHandle, ADC_IntNumber_1, ADC_IntMode_EOC);
ADC_setIntMode(obj->adcHandle, ADC_IntNumber_2, ADC_IntMode_EOC);
//ADCINTs trigger at end of conversion
ADC_setIntPulseGenMode(obj->adcHandle, ADC_IntPulseGenMode_Prior);
// Setup ADCINT1 and ADCINT2 trigger source
ADC_setIntSrc(obj->adcHandle, ADC_IntNumber_1, ADC_IntSrc_EOC6);
ADC_setIntSrc(obj->adcHandle, ADC_IntNumber_2, ADC_IntSrc_EOC14);
// Setup each SOC's ADCINT trigger source
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_0, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_1, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_2, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_3, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_4, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_5, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_6, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_7, ADC_Int2TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_8, ADC_Int1TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_9, ADC_Int1TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_10, ADC_Int1TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_11, ADC_Int1TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_12, ADC_Int1TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_13, ADC_Int1TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_14, ADC_Int1TriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_15, ADC_Int1TriggersSOC);
// Delay before converting ADC channels
usDelay(US_TO_CNT(ADC_DELAY_usec));
ADC_setSocFrcWord(obj->adcHandle, 0x00FF);
while( index < SampleSize )
{
//Wait for ADCINT1 to trigger, then add ADCRESULT0-7 registers to sum
while (ADC_getIntFlag(obj->adcHandle, ADC_IntNumber_1) == 0){}
//Must clear ADCINT1 flag since INT1CONT = 0
ADC_clearIntFlag(obj->adcHandle, ADC_IntNumber_1);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_0);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_1);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_2);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_3);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_4);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_5);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_6);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_7);
//Wait for ADCINT2 to trigger, then add ADCRESULT8-15 registers to sum
while (ADC_getIntFlag(obj->adcHandle, ADC_IntNumber_2) == 0){}
//Must clear ADCINT2 flag since INT2CONT = 0
ADC_clearIntFlag(obj->adcHandle, ADC_IntNumber_2);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_8);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_9);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_10);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_11);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_12);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_13);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_14);
Sum += ADC_readResult(obj->adcHandle, ADC_ResultNumber_15);
index+=16;
} // end data collection
//Disable ADCINT1 and ADCINT2 to STOP the ping-pong sampling
ADC_disableInt(obj->adcHandle, ADC_IntNumber_1);
ADC_disableInt(obj->adcHandle, ADC_IntNumber_2);
//Calculate average ADC sample value
Mean = Sum / SampleSize;
// Clear start of conversion trigger
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_0, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_1, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_2, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_3, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_4, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_5, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_6, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_7, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_8, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_9, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_10, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_11, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_12, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_13, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_14, ADC_NoIntTriggersSOC);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_15, ADC_NoIntTriggersSOC);
//return the average
return(Mean);
} // end of HAL_AdcCalConversion() function
void HAL_disableWdog(HAL_Handle halHandle)
{
HAL_Obj *hal = (HAL_Obj *)halHandle;
WDOG_disable(hal->wdogHandle);
return;
} // end of HAL_disableWdog() function
void HAL_disableGlobalInts(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
CPU_disableGlobalInts(obj->cpuHandle);
return;
} // end of HAL_disableGlobalInts() function
void HAL_enableAdcInts(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// enable the PIE interrupts associated with the ADC interrupts
PIE_enableAdcInt(obj->pieHandle,ADC_IntNumber_1);
// enable the ADC interrupts
ADC_enableInt(obj->adcHandle,ADC_IntNumber_1);
// enable the cpu interrupt for ADC interrupts
CPU_enableInt(obj->cpuHandle,CPU_IntNumber_10);
return;
} // end of HAL_enableAdcInts() function
void HAL_enableDebugInt(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
CPU_enableDebugInt(obj->cpuHandle);
return;
} // end of HAL_enableDebugInt() function
void HAL_enableDrv(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
#ifdef DRV8301_SPI
DRV8301_enable(obj->drv8301Handle);
#endif
#ifdef DRV8353
DRV8353_enable(obj->drv8353Handle);
#endif
return;
} // end of HAL_enableDrv() function
void HAL_enableGlobalInts(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
CPU_enableGlobalInts(obj->cpuHandle);
return;
} // end of HAL_enableGlobalInts() function
void HAL_enablePwmInt(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
PIE_enablePwmInt(obj->pieHandle,PWM_Number_1);
// enable the interrupt
PWM_enableInt(obj->pwmHandle[PWM_Number_1]);
// enable the cpu interrupt for EPWM1_INT
CPU_enableInt(obj->cpuHandle,CPU_IntNumber_3);
return;
} // end of HAL_enablePwmInt() function
void HAL_enableTimer0Int(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
PIE_enableTimer0Int(obj->pieHandle);
// enable the interrupt
TIMER_enableInt(obj->timerHandle[0]);
// enable the cpu interrupt for TINT0
CPU_enableInt(obj->cpuHandle,CPU_IntNumber_1);
return;
} // end of HAL_enablePwmInt() function
void HAL_setupFaults(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint_least8_t cnt;
// Configure Trip Mechanism for the Motor control software
// -Cycle by cycle trip on CPU halt
// -One shot fault trip zone
// These trips need to be repeated for EPWM1 ,2 & 3
for(cnt=0;cnt<3;cnt++)
{
PWM_enableTripZoneSrc(obj->pwmHandle[cnt],PWM_TripZoneSrc_CycleByCycle_TZ6_NOT);
PWM_enableTripZoneSrc(obj->pwmHandle[cnt],PWM_TripZoneSrc_CycleByCycle_TZ3_NOT);
PWM_enableTripZoneSrc(obj->pwmHandle[cnt],PWM_TripZoneSrc_CycleByCycle_TZ2_NOT);
// What do we want the OST/CBC events to do?
// TZA events can force EPWMxA
// TZB events can force EPWMxB
PWM_setTripZoneState_TZA(obj->pwmHandle[cnt],PWM_TripZoneState_EPWM_Low);
PWM_setTripZoneState_TZB(obj->pwmHandle[cnt],PWM_TripZoneState_EPWM_Low);
}
return;
} // end of HAL_setupFaults() function
HAL_Handle HAL_init(void *pMemory,const size_t numBytes)
{
uint_least8_t cnt;
HAL_Handle handle;
HAL_Obj *obj;
if(numBytes < sizeof(HAL_Obj))
return((HAL_Handle)NULL);
// assign the handle
handle = (HAL_Handle)pMemory;
// assign the object
obj = (HAL_Obj *)handle;
// initialize the watchdog driver
obj->wdogHandle = WDOG_init((void *)WDOG_BASE_ADDR,sizeof(WDOG_Obj));
// disable watchdog
HAL_disableWdog(handle);
// initialize the ADC
obj->adcHandle = ADC_init((void *)ADC_BASE_ADDR,sizeof(ADC_Obj));
// initialize the clock handle
obj->clkHandle = CLK_init((void *)CLK_BASE_ADDR,sizeof(CLK_Obj));
// initialize the CPU handle
obj->cpuHandle = CPU_init(&cpu,sizeof(cpu));
// initialize the FLASH handle
obj->flashHandle = FLASH_init((void *)FLASH_BASE_ADDR,sizeof(FLASH_Obj));
// initialize the GPIO handle
obj->gpioHandle = GPIO_init((void *)GPIO_BASE_ADDR,sizeof(GPIO_Obj));
// initialize the current offset estimator handles
for(cnt=0;cnt<USER_NUM_CURRENT_SENSORS;cnt++)
{
obj->offsetHandle_I[cnt] = OFFSET_init(&obj->offset_I[cnt],sizeof(obj->offset_I[cnt]));
}
// initialize the voltage offset estimator handles
for(cnt=0;cnt<USER_NUM_VOLTAGE_SENSORS;cnt++)
{
obj->offsetHandle_V[cnt] = OFFSET_init(&obj->offset_V[cnt],sizeof(obj->offset_V[cnt]));
}
// initialize the oscillator handle
obj->oscHandle = OSC_init((void *)OSC_BASE_ADDR,sizeof(OSC_Obj));
// initialize the PIE handle
obj->pieHandle = PIE_init((void *)PIE_BASE_ADDR,sizeof(PIE_Obj));
// initialize the PLL handle
obj->pllHandle = PLL_init((void *)PLL_BASE_ADDR,sizeof(PLL_Obj));
// initialize the SPI handles
obj->spiAHandle = SPI_init((void *)SPIA_BASE_ADDR,sizeof(SPI_Obj));
//obj->spiBHandle = SPI_init((void *)SPIB_BASE_ADDR,sizeof(SPI_Obj));
// initialize PWM handles
obj->pwmHandle[0] = PWM_init((void *)PWM_ePWM1_BASE_ADDR,sizeof(PWM_Obj));
obj->pwmHandle[1] = PWM_init((void *)PWM_ePWM2_BASE_ADDR,sizeof(PWM_Obj));
obj->pwmHandle[2] = PWM_init((void *)PWM_ePWM3_BASE_ADDR,sizeof(PWM_Obj));
// initialize PWM DAC handles
obj->pwmDacHandle[0] = PWMDAC_init((void *)PWM_ePWM6_BASE_ADDR,sizeof(PWM_Obj));
obj->pwmDacHandle[1] = PWMDAC_init((void *)PWM_ePWM5_BASE_ADDR,sizeof(PWM_Obj));
obj->pwmDacHandle[2] = PWMDAC_init((void *)PWM_ePWM4_BASE_ADDR,sizeof(PWM_Obj));
// initialize power handle
obj->pwrHandle = PWR_init((void *)PWR_BASE_ADDR,sizeof(PWR_Obj));
// initialize timer handles
obj->timerHandle[0] = TIMER_init((void *)TIMER0_BASE_ADDR,sizeof(TIMER_Obj));
obj->timerHandle[1] = TIMER_init((void *)TIMER1_BASE_ADDR,sizeof(TIMER_Obj));
obj->timerHandle[2] = TIMER_init((void *)TIMER2_BASE_ADDR,sizeof(TIMER_Obj));
#ifdef DRV8301_SPI
// initialize drv8301 interface
obj->drv8301Handle = DRV8301_init(&obj->drv8301,sizeof(obj->drv8301));
#endif
#ifdef DRV8353
// initialize drv8353 interface
obj->drv8353Handle = DRV8353_init(&obj->drv8353,sizeof(obj->drv8353));
#endif
#ifdef QEP
// initialize QEP driver
obj->qepHandle[0] = QEP_init((void*)QEP1_BASE_ADDR,sizeof(QEP_Obj));
#endif
return(handle);
} // end of HAL_init() function
//
void HAL_setParams(HAL_Handle handle,const USER_Params *pUserParams)
{
uint_least8_t cnt;
HAL_Obj *obj = (HAL_Obj *)handle;
_iq beta_lp_pu = _IQ(pUserParams->offsetPole_rps/(float_t)pUserParams->ctrlFreq_Hz);
HAL_setNumCurrentSensors(handle,pUserParams->numCurrentSensors);
HAL_setNumVoltageSensors(handle,pUserParams->numVoltageSensors);
for(cnt=0;cnt<HAL_getNumCurrentSensors(handle);cnt++)
{
HAL_setOffsetBeta_lp_pu(handle,HAL_SensorType_Current,cnt,beta_lp_pu);
HAL_setOffsetInitCond(handle,HAL_SensorType_Current,cnt,_IQ(0.0));
HAL_setOffsetValue(handle,HAL_SensorType_Current,cnt,_IQ(0.0));
}
for(cnt=0;cnt<HAL_getNumVoltageSensors(handle);cnt++)
{
HAL_setOffsetBeta_lp_pu(handle,HAL_SensorType_Voltage,cnt,beta_lp_pu);
HAL_setOffsetInitCond(handle,HAL_SensorType_Voltage,cnt,_IQ(0.0));
HAL_setOffsetValue(handle,HAL_SensorType_Voltage,cnt,_IQ(0.0));
}
// disable global interrupts
CPU_disableGlobalInts(obj->cpuHandle);
// disable cpu interrupts
CPU_disableInts(obj->cpuHandle);
// clear cpu interrupt flags
CPU_clearIntFlags(obj->cpuHandle);
// setup the clocks
HAL_setupClks(handle);
// Setup the PLL
HAL_setupPll(handle,PLL_ClkFreq_90_MHz);
// setup the PIE
HAL_setupPie(handle);
// run the device calibration
HAL_cal(handle);
// setup the peripheral clocks
HAL_setupPeripheralClks(handle);
// setup the GPIOs
HAL_setupGpios(handle);
// setup the flash
HAL_setupFlash(handle);
// setup the ADCs
HAL_setupAdcs(handle);
// setup the PWMs
HAL_setupPwms(handle,
(float_t)pUserParams->systemFreq_MHz,
pUserParams->pwmPeriod_usec,
USER_NUM_PWM_TICKS_PER_ISR_TICK);
#ifdef QEP
// setup the QEP
HAL_setupQEP(handle,HAL_Qep_QEP1);
#endif
// setup the spiA
HAL_setupSpiA(handle);
// setup the spiB
//HAL_setupSpiB(handle);
// setup the PWM DACs
HAL_setupPwmDacs(handle);
// setup the timers
HAL_setupTimers(handle,
(float_t)pUserParams->systemFreq_MHz);
// setup the drv8301 interface
HAL_setupGate(handle);
// set the default current bias
{
uint_least8_t cnt;
_iq bias = _IQ12mpy(ADC_dataBias,_IQ(pUserParams->current_sf));
for(cnt=0;cnt<HAL_getNumCurrentSensors(handle);cnt++)
{
HAL_setBias(handle,HAL_SensorType_Current,cnt,bias);
}
}
// set the current scale factor
{
_iq current_sf = _IQ(pUserParams->current_sf);
HAL_setCurrentScaleFactor(handle,current_sf);
}
// set the default voltage bias
{
uint_least8_t cnt;
_iq bias = _IQ(0.0);
for(cnt=0;cnt<HAL_getNumVoltageSensors(handle);cnt++)
{
HAL_setBias(handle,HAL_SensorType_Voltage,cnt,bias);
}
}
// set the voltage scale factor
{
_iq voltage_sf = _IQ(pUserParams->voltage_sf);
HAL_setVoltageScaleFactor(handle,voltage_sf);
}
return;
} // end of HAL_setParams() function
void HAL_setupAdcs(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// disable the ADCs
ADC_disable(obj->adcHandle);
// power up the bandgap circuit
ADC_enableBandGap(obj->adcHandle);
// set the ADC voltage reference source to internal
ADC_setVoltRefSrc(obj->adcHandle,ADC_VoltageRefSrc_Int);
// enable the ADC reference buffers
ADC_enableRefBuffers(obj->adcHandle);
// Set main clock scaling factor (max45MHz clock for the ADC module)
ADC_setDivideSelect(obj->adcHandle,ADC_DivideSelect_ClkIn_by_2);
// power up the ADCs
ADC_powerUp(obj->adcHandle);
// enable the ADCs
ADC_enable(obj->adcHandle);
// set the ADC interrupt pulse generation to prior
ADC_setIntPulseGenMode(obj->adcHandle,ADC_IntPulseGenMode_Prior);
// set the temperature sensor source to external
ADC_setTempSensorSrc(obj->adcHandle,ADC_TempSensorSrc_Ext);
// configure the interrupt sources
ADC_disableInt(obj->adcHandle,ADC_IntNumber_1);
ADC_setIntMode(obj->adcHandle,ADC_IntNumber_1,ADC_IntMode_ClearFlag);
ADC_setIntSrc(obj->adcHandle,ADC_IntNumber_1,ADC_IntSrc_EOC7);
#ifdef DRV8301_SPI
//configure the SOCs for drv8301kit_revD
// EXT IA-FB
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_0,ADC_SocChanNumber_A6);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_0,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_0,ADC_SocSampleDelay_9_cycles);
// EXT IA-FB
// Duplicate conversion due to ADC Initial Conversion bug (SPRZ342)
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_1,ADC_SocChanNumber_A6);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_1,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_1,ADC_SocSampleDelay_9_cycles);
// EXT IB-FB
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_2,ADC_SocChanNumber_B6);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_2,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_2,ADC_SocSampleDelay_9_cycles);
// EXT IC-FB
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_3,ADC_SocChanNumber_A0);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_3,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_3,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb1
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_4,ADC_SocChanNumber_B7);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_4,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_4,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb2
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_5,ADC_SocChanNumber_A7);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_5,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_5,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb3
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_6,ADC_SocChanNumber_B4);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_6,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_6,ADC_SocSampleDelay_9_cycles);
// VDCBUS
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_7,ADC_SocChanNumber_B2);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_7,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_7,ADC_SocSampleDelay_9_cycles);
// Potentiometer
// Configure it so that ADCINT1 will trigger a potentiometer conversion
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_8,ADC_SocChanNumber_B0);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_8, ADC_Int1TriggersSOC);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_8,ADC_SocSampleDelay_9_cycles);
#endif
#ifdef DRV8353
//configure the SOCs for drv8353 custom board RT
// EXT IA-FB
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_0,ADC_SocChanNumber_A6);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_0,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_0,ADC_SocSampleDelay_9_cycles);
// EXT IA-FB
// Duplicate conversion due to ADC Initial Conversion bug (SPRZ342)
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_1,ADC_SocChanNumber_A6);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_1,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_1,ADC_SocSampleDelay_9_cycles);
// EXT IB-FB
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_2,ADC_SocChanNumber_A5);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_2,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_2,ADC_SocSampleDelay_9_cycles);
// EXT IC-FB
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_3,ADC_SocChanNumber_A4);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_3,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_3,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb1
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_4,ADC_SocChanNumber_A0);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_4,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_4,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb2
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_5,ADC_SocChanNumber_A1);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_5,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_5,ADC_SocSampleDelay_9_cycles);
// ADC-Vhb3
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_6,ADC_SocChanNumber_A2);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_6,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_6,ADC_SocSampleDelay_9_cycles);
// VDCBUS
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_7,ADC_SocChanNumber_B0);
ADC_setSocTrigSrc(obj->adcHandle,ADC_SocNumber_7,ADC_SocTrigSrc_EPWM1_ADCSOCA);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_7,ADC_SocSampleDelay_9_cycles);
// Torque
// Configure it so that ADCINT1 will trigger a potentiometer conversion
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_8,ADC_SocChanNumber_B5);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_8, ADC_Int1TriggersSOC);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_8,ADC_SocSampleDelay_9_cycles);
// Temperature
// Configure it so that ADCINT1 will trigger a potentiometer conversion
ADC_setSocChanNumber(obj->adcHandle,ADC_SocNumber_9,ADC_SocChanNumber_B4);
ADC_setupSocTrigSrc(obj->adcHandle, ADC_SocNumber_9, ADC_Int1TriggersSOC);
ADC_setSocSampleDelay(obj->adcHandle,ADC_SocNumber_9,ADC_SocSampleDelay_9_cycles);
#endif
return;
} // end of HAL_setupAdcs() function
void HAL_setupClks(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// enable internal oscillator 1
CLK_enableOsc1(obj->clkHandle);
// set the oscillator source
CLK_setOscSrc(obj->clkHandle,CLK_OscSrc_Internal);
// disable the external clock in
CLK_disableClkIn(obj->clkHandle);
// disable the crystal oscillator
CLK_disableCrystalOsc(obj->clkHandle);
// disable oscillator 2
CLK_disableOsc2(obj->clkHandle);
// set the low speed clock prescaler
CLK_setLowSpdPreScaler(obj->clkHandle,CLK_LowSpdPreScaler_SysClkOut_by_1);
// set the clock out prescaler
CLK_setClkOutPreScaler(obj->clkHandle,CLK_ClkOutPreScaler_SysClkOut_by_1);
return;
} // end of HAL_setupClks() function
void HAL_setupFlash(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
FLASH_enablePipelineMode(obj->flashHandle);
FLASH_setNumPagedReadWaitStates(obj->flashHandle,FLASH_NumPagedWaitStates_3);
FLASH_setNumRandomReadWaitStates(obj->flashHandle,FLASH_NumRandomWaitStates_3);
FLASH_setOtpWaitStates(obj->flashHandle,FLASH_NumOtpWaitStates_5);
FLASH_setStandbyWaitCount(obj->flashHandle,FLASH_STANDBY_WAIT_COUNT_DEFAULT);
FLASH_setActiveWaitCount(obj->flashHandle,FLASH_ACTIVE_WAIT_COUNT_DEFAULT);
return;
} // HAL_setupFlash() function
void HAL_setupGate(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
#ifdef DRV8301_SPI
DRV8301_setSpiHandle(obj->drv8301Handle,obj->spiBHandle);
DRV8301_setGpioHandle(obj->drv8301Handle,obj->gpioHandle);
DRV8301_setGpioNumber(obj->drv8301Handle,GPIO_Number_22);
#endif
#ifdef DRV8353
#ifdef DRV8353_SPI
// if(gDeviceVariant)
DRV8353_setSpiHandle(obj->drv8353Handle,obj->spiAHandle);
#endif
DRV8353_setGpioHandle(obj->drv8353Handle,obj->gpioHandle);
DRV8353_setGpioNumber(obj->drv8353Handle,GPIO_Number_22);
#endif
return;
} // HAL_setupGate() function
void HAL_setupGpios(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
//PWM pinout definitions
// PWM1
GPIO_setMode(obj->gpioHandle,GPIO_Number_0,GPIO_0_Mode_EPWM1A);
// PWM2
GPIO_setMode(obj->gpioHandle,GPIO_Number_1,GPIO_1_Mode_EPWM1B);
// PWM3
GPIO_setMode(obj->gpioHandle,GPIO_Number_2,GPIO_2_Mode_EPWM2A);
// PWM4
GPIO_setMode(obj->gpioHandle,GPIO_Number_3,GPIO_3_Mode_EPWM2B);
// PWM5
GPIO_setMode(obj->gpioHandle,GPIO_Number_4,GPIO_4_Mode_EPWM3A);
// PWM6
GPIO_setMode(obj->gpioHandle,GPIO_Number_5,GPIO_5_Mode_EPWM3B);
// Set Qualification Period for GPIO16-23, 5*2*(1/90MHz) = 0.11us
GPIO_setQualificationPeriod(obj->gpioHandle,GPIO_Number_16,5);
/*GPIO_setMode(obj->gpioHandle,GPIO_Number_16,GPIO_16_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_16);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_16,GPIO_Direction_Output);
GPIO_setMode(obj->gpioHandle,GPIO_Number_17,GPIO_17_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_17);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_17,GPIO_Direction_Output);
GPIO_setMode(obj->gpioHandle,GPIO_Number_18,GPIO_18_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_18);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_18,GPIO_Direction_Output);
GPIO_setMode(obj->gpioHandle,GPIO_Number_19,GPIO_19_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_19);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_19,GPIO_Direction_Output);*/
// SPI-SIMO
GPIO_setMode(obj->gpioHandle,GPIO_Number_16,GPIO_16_Mode_SPISIMOA);
// GPIO_setPullup(obj->gpioHandle,GPIO_Number_16, GPIO_Pullup_Enable);
// SPI-SOMI
GPIO_setMode(obj->gpioHandle,GPIO_Number_17,GPIO_17_Mode_SPISOMIA);
// GPIO_setPullup(obj->gpioHandle,GPIO_Number_17, GPIO_Pullup_Enable);
// SPI-CLK
GPIO_setMode(obj->gpioHandle,GPIO_Number_18,GPIO_18_Mode_SPICLKA);
// GPIO_setPullup(obj->gpioHandle,GPIO_Number_18, GPIO_Pullup_Enable);
// SPI-STE
GPIO_setMode(obj->gpioHandle,GPIO_Number_19,GPIO_19_Mode_SPISTEA_NOT);
// GPIO_setPullup(obj->gpioHandle,GPIO_Number_19, GPIO_Pullup_Enable);
//GPIO 19 - Enable CS
//GPIO_setMode(obj->gpioHandle,GPIO_Number_19,GPIO_19_Mode_GeneralPurpose);
//GPIO_setHigh(obj->gpioHandle,GPIO_Number_19);
//GPIO_setDirection(obj->gpioHandle,GPIO_Number_19,GPIO_Direction_Output);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_32,GPIO_32_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_33,GPIO_33_Mode_GeneralPurpose);
// JTAG
GPIO_setMode(obj->gpioHandle,GPIO_Number_35,GPIO_35_Mode_JTAG_TDI);
GPIO_setMode(obj->gpioHandle,GPIO_Number_36,GPIO_36_Mode_JTAG_TMS);
GPIO_setMode(obj->gpioHandle,GPIO_Number_37,GPIO_37_Mode_JTAG_TDO);
GPIO_setMode(obj->gpioHandle,GPIO_Number_38,GPIO_38_Mode_JTAG_TCK);
//evaluation board drv8301
#ifdef DRV8301_SPI
// PWM-DAC1
GPIO_setMode(obj->gpioHandle,GPIO_Number_10,GPIO_10_Mode_EPWM6A);
// PWM-DAC4
GPIO_setMode(obj->gpioHandle,GPIO_Number_6,GPIO_6_Mode_EPWM4A);
// Push Button SW2
GPIO_setMode(obj->gpioHandle,GPIO_Number_7,GPIO_7_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_7,GPIO_Direction_Input);
// ADCSOCAO_NOT or PWM-DAC3
GPIO_setMode(obj->gpioHandle,GPIO_Number_8,GPIO_8_Mode_EPWM5A);
// Push Button SW1
GPIO_setMode(obj->gpioHandle,GPIO_Number_9,GPIO_9_Mode_GeneralPurpose);
// PWM-DAC2
GPIO_setMode(obj->gpioHandle,GPIO_Number_11,GPIO_11_Mode_EPWM6B);
// DRV8301-LED1
GPIO_setMode(obj->gpioHandle,GPIO_Number_12,GPIO_12_Mode_GeneralPurpose);
// OCTWn
GPIO_setMode(obj->gpioHandle,GPIO_Number_13,GPIO_13_Mode_TZ2_NOT);
// FAULTn
GPIO_setMode(obj->gpioHandle,GPIO_Number_14,GPIO_14_Mode_TZ3_NOT);
// LED2
GPIO_setMode(obj->gpioHandle,GPIO_Number_15,GPIO_15_Mode_GeneralPurpose);
#ifdef QEP
// EQEPA
GPIO_setMode(obj->gpioHandle,GPIO_Number_20,GPIO_20_Mode_EQEP1A);
GPIO_setQualification(obj->gpioHandle,GPIO_Number_20,GPIO_Qual_Sample_3);
// EQEPB
GPIO_setMode(obj->gpioHandle,GPIO_Number_21,GPIO_21_Mode_EQEP1B);
GPIO_setQualification(obj->gpioHandle,GPIO_Number_21,GPIO_Qual_Sample_3);
// STATUS
GPIO_setMode(obj->gpioHandle,GPIO_Number_22,GPIO_22_Mode_GeneralPurpose);
// EQEP1I
GPIO_setMode(obj->gpioHandle,GPIO_Number_23,GPIO_23_Mode_EQEP1I);
GPIO_setQualification(obj->gpioHandle,GPIO_Number_23,GPIO_Qual_Sample_3);
#else
// EQEPA
GPIO_setMode(obj->gpioHandle,GPIO_Number_20,GPIO_20_Mode_GeneralPurpose);
// EQEPB
GPIO_setMode(obj->gpioHandle,GPIO_Number_21,GPIO_21_Mode_GeneralPurpose);
// STATUS
// GPIO_setMode(obj->gpioHandle,GPIO_Number_22,GPIO_22_Mode_GeneralPurpose);
//GPIO 22 DRV Enable
GPIO_setMode(obj->gpioHandle,GPIO_Number_22,GPIO_22_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_22);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_22,GPIO_Direction_Output);
// EQEP1I
GPIO_setMode(obj->gpioHandle,GPIO_Number_23,GPIO_23_Mode_GeneralPurpose);
#endif
// SPI SIMO B
GPIO_setMode(obj->gpioHandle,GPIO_Number_24,GPIO_24_Mode_SPISIMOB);
// SPI SOMI B
GPIO_setMode(obj->gpioHandle,GPIO_Number_25,GPIO_25_Mode_SPISOMIB);
// SPI CLK B
GPIO_setMode(obj->gpioHandle,GPIO_Number_26,GPIO_26_Mode_SPICLKB);
// SPI CSn B
GPIO_setMode(obj->gpioHandle,GPIO_Number_27,GPIO_27_Mode_SPISTEB_NOT);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_28,GPIO_28_Mode_GeneralPurpose);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_28, GPIO_Pullup_Enable);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_29,GPIO_29_Mode_GeneralPurpose);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_29, GPIO_Pullup_Enable);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_30,GPIO_30_Mode_GeneralPurpose);
// ControlCARD LED2
GPIO_setMode(obj->gpioHandle,GPIO_Number_31,GPIO_31_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_31);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_31,GPIO_Direction_Output);
// ControlCARD LED3
GPIO_setMode(obj->gpioHandle,GPIO_Number_34,GPIO_34_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_34);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_34,GPIO_Direction_Output);
// DRV8301 Enable
GPIO_setMode(obj->gpioHandle,GPIO_Number_39,GPIO_39_Mode_GeneralPurpose);
// CAP1
GPIO_setMode(obj->gpioHandle,GPIO_Number_40,GPIO_40_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_40,GPIO_Direction_Input);
// CAP2
GPIO_setMode(obj->gpioHandle,GPIO_Number_41,GPIO_41_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_41,GPIO_Direction_Input);
// CAP3
GPIO_setMode(obj->gpioHandle,GPIO_Number_42,GPIO_42_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_42,GPIO_Direction_Input);
// DC_CAL
GPIO_setMode(obj->gpioHandle,GPIO_Number_43,GPIO_43_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_44,GPIO_44_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_50,GPIO_50_Mode_GeneralPurpose);
// DRV8301 Enable
GPIO_setMode(obj->gpioHandle,GPIO_Number_51,GPIO_51_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_51);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_51,GPIO_Direction_Output);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_52,GPIO_52_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_53,GPIO_53_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_54,GPIO_54_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_55,GPIO_55_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_56,GPIO_56_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_57,GPIO_57_Mode_GeneralPurpose);
// No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_58,GPIO_58_Mode_GeneralPurpose);
#endif
//my custom board pinout definition
#ifdef DRV8353
//Hall C - GPIO 6
GPIO_setMode(obj->gpioHandle,GPIO_Number_6,GPIO_6_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_6,GPIO_Direction_Input);
//Speed Motor - GPIO 7
GPIO_setMode(obj->gpioHandle,GPIO_Number_7,GPIO_7_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_7,GPIO_Direction_Input);
//GPIO 8 not connected
GPIO_setMode(obj->gpioHandle,GPIO_Number_8,GPIO_8_Mode_GeneralPurpose);
//Cadence - GPIO 9
GPIO_setMode(obj->gpioHandle,GPIO_Number_9,GPIO_9_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_9,GPIO_Direction_Input);
//GPIO 10 - Enable LightOut
GPIO_setMode(obj->gpioHandle,GPIO_Number_10,GPIO_10_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_10);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_10,GPIO_Direction_Output);
//GPIO 11 not connected
GPIO_setMode(obj->gpioHandle,GPIO_Number_11,GPIO_11_Mode_EPWM6B);
//GPIO 12 - Enable UART
GPIO_setMode(obj->gpioHandle,GPIO_Number_12,GPIO_12_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_12);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_12,GPIO_Direction_Output);
//GPIO 20 not connected
GPIO_setMode(obj->gpioHandle,GPIO_Number_20,GPIO_20_Mode_GeneralPurpose);
//GPIO 21 not connected
GPIO_setMode(obj->gpioHandle,GPIO_Number_21,GPIO_21_Mode_GeneralPurpose);
//GPIO 22 DRV Enable
GPIO_setMode(obj->gpioHandle,GPIO_Number_22,GPIO_22_Mode_GeneralPurpose);
GPIO_setLow(obj->gpioHandle,GPIO_Number_22);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_22,GPIO_Direction_Output);
//GPIO 23 - nFAULT DRV8353
GPIO_setMode(obj->gpioHandle,GPIO_Number_23,GPIO_23_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_23,GPIO_Direction_Input);
//GPIO 24 No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_24,GPIO_24_Mode_GeneralPurpose);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_24, GPIO_Pullup_Enable);
//GPIO 25 No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_25,GPIO_25_Mode_GeneralPurpose);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_25, GPIO_Pullup_Enable);
//GPIO 26 No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_26,GPIO_26_Mode_GeneralPurpose);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_26, GPIO_Pullup_Enable);
//GPIO 27 No Connection
GPIO_setMode(obj->gpioHandle,GPIO_Number_27,GPIO_27_Mode_GeneralPurpose);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_27, GPIO_Pullup_Enable);
// GPIO 28 - UART RX A
GPIO_setMode(obj->gpioHandle,GPIO_Number_28,GPIO_28_Mode_SCIRXDA);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_28, GPIO_Pullup_Enable);
// GPIO 29 - UART TX A
GPIO_setMode(obj->gpioHandle,GPIO_Number_29,GPIO_29_Mode_SCITXDA);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_29, GPIO_Pullup_Enable);
// GPIO 30 - CAN RX A
GPIO_setMode(obj->gpioHandle,GPIO_Number_30,GPIO_30_Mode_CANRXA);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_30, GPIO_Pullup_Enable);
// GPIO 31 - CAN TX A
GPIO_setMode(obj->gpioHandle,GPIO_Number_31,GPIO_31_Mode_CANTXA);
//GPIO_setPullup(obj->gpioHandle,GPIO_Number_30, GPIO_Pullup_Enable);
//Hall A - GPIO 34
GPIO_setMode(obj->gpioHandle,GPIO_Number_34,GPIO_34_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_34,GPIO_Direction_Input);
//Hall B - GPIO 39
GPIO_setMode(obj->gpioHandle,GPIO_Number_39,GPIO_39_Mode_GeneralPurpose);
GPIO_setDirection(obj->gpioHandle,GPIO_Number_39,GPIO_Direction_Input);
#endif
return;
} // end of HAL_setupGpios() function
void HAL_setupPie(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
PIE_disable(obj->pieHandle);
PIE_disableAllInts(obj->pieHandle);
PIE_clearAllInts(obj->pieHandle);
PIE_clearAllFlags(obj->pieHandle);
PIE_setDefaultIntVectorTable(obj->pieHandle);
PIE_enable(obj->pieHandle);
return;
} // end of HAL_setupPie() function
void HAL_setupPeripheralClks(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
CLK_enableAdcClock(obj->clkHandle);
CLK_enableCompClock(obj->clkHandle,CLK_CompNumber_1);
CLK_enableCompClock(obj->clkHandle,CLK_CompNumber_2);
CLK_enableCompClock(obj->clkHandle,CLK_CompNumber_3);
CLK_enableEcap1Clock(obj->clkHandle);
CLK_disableEcanaClock(obj->clkHandle);
#ifdef QEP
CLK_enableEqep1Clock(obj->clkHandle);
CLK_enableEqep2Clock(obj->clkHandle);
#endif
CLK_enablePwmClock(obj->clkHandle,PWM_Number_1);
CLK_enablePwmClock(obj->clkHandle,PWM_Number_2);
CLK_enablePwmClock(obj->clkHandle,PWM_Number_3);
CLK_enablePwmClock(obj->clkHandle,PWM_Number_4);
CLK_enablePwmClock(obj->clkHandle,PWM_Number_5);
CLK_enablePwmClock(obj->clkHandle,PWM_Number_6);
CLK_enablePwmClock(obj->clkHandle,PWM_Number_7);
CLK_disableHrPwmClock(obj->clkHandle);
CLK_disableI2cClock(obj->clkHandle);
CLK_disableLinAClock(obj->clkHandle);
CLK_disableClaClock(obj->clkHandle);
CLK_enableSciaClock(obj->clkHandle);
CLK_enableSpiaClock(obj->clkHandle);
//CLK_enableSpibClock(obj->clkHandle);
CLK_enableTbClockSync(obj->clkHandle);
return;
} // end of HAL_setupPeripheralClks() function
void HAL_setupPll(HAL_Handle handle,const PLL_ClkFreq_e clkFreq)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// make sure PLL is not running in limp mode
if(PLL_getClkStatus(obj->pllHandle) != PLL_ClkStatus_Normal)
{
// reset the clock detect
PLL_resetClkDetect(obj->pllHandle);
// ???????
asm(" ESTOP0");
}
// Divide Select must be ClkIn/4 before the clock rate can be changed
if(PLL_getDivideSelect(obj->pllHandle) != PLL_DivideSelect_ClkIn_by_4)
{
PLL_setDivideSelect(obj->pllHandle,PLL_DivideSelect_ClkIn_by_4);
}
if(PLL_getClkFreq(obj->pllHandle) != clkFreq)
{
// disable the clock detect
PLL_disableClkDetect(obj->pllHandle);
// set the clock rate
PLL_setClkFreq(obj->pllHandle,clkFreq);
}
// wait until locked
while(PLL_getLockStatus(obj->pllHandle) != PLL_LockStatus_Done) {}
// enable the clock detect
PLL_enableClkDetect(obj->pllHandle);
// set divide select to ClkIn/2 to get desired clock rate
// NOTE: clock must be locked before setting this register
PLL_setDivideSelect(obj->pllHandle,PLL_DivideSelect_ClkIn_by_2);
return;
} // end of HAL_setupPll() function
void HAL_setupPwms(HAL_Handle handle,
const float_t systemFreq_MHz,
const float_t pwmPeriod_usec,
const uint_least16_t numPwmTicksPerIsrTick)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint16_t halfPeriod_cycles = (uint16_t)(systemFreq_MHz*pwmPeriod_usec) >> 1;
uint_least8_t cnt;
// turns off the outputs of the EPWM peripherals which will put the power switches
// into a high impedance state.
PWM_setOneShotTrip(obj->pwmHandle[PWM_Number_1]);
PWM_setOneShotTrip(obj->pwmHandle[PWM_Number_2]);
PWM_setOneShotTrip(obj->pwmHandle[PWM_Number_3]);
// first step to synchronize the pwms
CLK_disableTbClockSync(obj->clkHandle);
for(cnt=0;cnt<3;cnt++)
{
// setup the Time-Base Control Register (TBCTL)
PWM_setCounterMode(obj->pwmHandle[cnt],PWM_CounterMode_UpDown);
PWM_disableCounterLoad(obj->pwmHandle[cnt]);
PWM_setPeriodLoad(obj->pwmHandle[cnt],PWM_PeriodLoad_Immediate);
PWM_setSyncMode(obj->pwmHandle[cnt],PWM_SyncMode_EPWMxSYNC);
PWM_setHighSpeedClkDiv(obj->pwmHandle[cnt],PWM_HspClkDiv_by_1);
PWM_setClkDiv(obj->pwmHandle[cnt],PWM_ClkDiv_by_1);
PWM_setPhaseDir(obj->pwmHandle[cnt],PWM_PhaseDir_CountUp);
PWM_setRunMode(obj->pwmHandle[cnt],PWM_RunMode_FreeRun);
// setup the Timer-Based Phase Register (TBPHS)
PWM_setPhase(obj->pwmHandle[cnt],0);
// setup the Time-Base Counter Register (TBCTR)
PWM_setCount(obj->pwmHandle[cnt],0);
// setup the Time-Base Period Register (TBPRD)
// set to zero initially
PWM_setPeriod(obj->pwmHandle[cnt],0);
// setup the Counter-Compare Control Register (CMPCTL)
PWM_setLoadMode_CmpA(obj->pwmHandle[cnt],PWM_LoadMode_Zero);
PWM_setLoadMode_CmpB(obj->pwmHandle[cnt],PWM_LoadMode_Zero);
PWM_setShadowMode_CmpA(obj->pwmHandle[cnt],PWM_ShadowMode_Shadow);
PWM_setShadowMode_CmpB(obj->pwmHandle[cnt],PWM_ShadowMode_Immediate);
// setup the Action-Qualifier Output A Register (AQCTLA)
PWM_setActionQual_CntUp_CmpA_PwmA(obj->pwmHandle[cnt],PWM_ActionQual_Set);
PWM_setActionQual_CntDown_CmpA_PwmA(obj->pwmHandle[cnt],PWM_ActionQual_Clear);
// setup the Dead-Band Generator Control Register (DBCTL)
PWM_setDeadBandOutputMode(obj->pwmHandle[cnt],PWM_DeadBandOutputMode_EPWMxA_Rising_EPWMxB_Falling);
PWM_setDeadBandPolarity(obj->pwmHandle[cnt],PWM_DeadBandPolarity_EPWMxB_Inverted);
// setup the Dead-Band Rising Edge Delay Register (DBRED)
PWM_setDeadBandRisingEdgeDelay(obj->pwmHandle[cnt],HAL_PWM_DBRED_CNT);
// setup the Dead-Band Falling Edge Delay Register (DBFED)
PWM_setDeadBandFallingEdgeDelay(obj->pwmHandle[cnt],HAL_PWM_DBFED_CNT);
// setup the PWM-Chopper Control Register (PCCTL)
PWM_disableChopping(obj->pwmHandle[cnt]);
// setup the Trip Zone Select Register (TZSEL)
PWM_disableTripZones(obj->pwmHandle[cnt]);
}
// setup the Event Trigger Selection Register (ETSEL)
PWM_disableInt(obj->pwmHandle[PWM_Number_1]);
PWM_setSocAPulseSrc(obj->pwmHandle[PWM_Number_1],PWM_SocPulseSrc_CounterEqualZero);
PWM_enableSocAPulse(obj->pwmHandle[PWM_Number_1]);
// setup the Event Trigger Prescale Register (ETPS)
if(numPwmTicksPerIsrTick == 3)
{
PWM_setIntPeriod(obj->pwmHandle[PWM_Number_1],PWM_IntPeriod_ThirdEvent);
PWM_setSocAPeriod(obj->pwmHandle[PWM_Number_1],PWM_SocPeriod_ThirdEvent);
}
else if(numPwmTicksPerIsrTick == 2)
{
PWM_setIntPeriod(obj->pwmHandle[PWM_Number_1],PWM_IntPeriod_SecondEvent);
PWM_setSocAPeriod(obj->pwmHandle[PWM_Number_1],PWM_SocPeriod_SecondEvent);
}
else
{
PWM_setIntPeriod(obj->pwmHandle[PWM_Number_1],PWM_IntPeriod_FirstEvent);
PWM_setSocAPeriod(obj->pwmHandle[PWM_Number_1],PWM_SocPeriod_FirstEvent);
}
// setup the Event Trigger Clear Register (ETCLR)
PWM_clearIntFlag(obj->pwmHandle[PWM_Number_1]);
PWM_clearSocAFlag(obj->pwmHandle[PWM_Number_1]);
// since the PWM is configured as an up/down counter, the period register is set to one-half
// of the desired PWM period
PWM_setPeriod(obj->pwmHandle[PWM_Number_1],halfPeriod_cycles);
PWM_setPeriod(obj->pwmHandle[PWM_Number_2],halfPeriod_cycles);
PWM_setPeriod(obj->pwmHandle[PWM_Number_3],halfPeriod_cycles);
// last step to synchronize the pwms
CLK_enableTbClockSync(obj->clkHandle);
return;
} // end of HAL_setupPwms() function
#ifdef QEP
void HAL_setupQEP(HAL_Handle handle,HAL_QepSelect_e qep)
{
HAL_Obj *obj = (HAL_Obj *)handle;
// hold the counter in reset
QEP_reset_counter(obj->qepHandle[qep]);
// set the QPOSINIT register
QEP_set_posn_init_count(obj->qepHandle[qep], 0);
// disable all interrupts
QEP_disable_all_interrupts(obj->qepHandle[qep]);
// clear the interrupt flags
QEP_clear_all_interrupt_flags(obj->qepHandle[qep]);
// clear the position counter
QEP_clear_posn_counter(obj->qepHandle[qep]);
// setup the max position
QEP_set_max_posn_count(obj->qepHandle[qep], (4*USER_MOTOR_ENCODER_LINES)-1);
// setup the QDECCTL register
QEP_set_QEP_source(obj->qepHandle[qep], QEP_Qsrc_Quad_Count_Mode);
QEP_disable_sync_out(obj->qepHandle[qep]);
QEP_set_swap_quad_inputs(obj->qepHandle[qep], QEP_Swap_Not_Swapped);
QEP_disable_gate_index(obj->qepHandle[qep]);
QEP_set_ext_clock_rate(obj->qepHandle[qep], QEP_Xcr_2x_Res);
QEP_set_A_polarity(obj->qepHandle[qep], QEP_Qap_No_Effect);
QEP_set_B_polarity(obj->qepHandle[qep], QEP_Qbp_No_Effect);
QEP_set_index_polarity(obj->qepHandle[qep], QEP_Qip_No_Effect);
// setup the QEPCTL register
QEP_set_emu_control(obj->qepHandle[qep], QEPCTL_Freesoft_Unaffected_Halt);
QEP_set_posn_count_reset_mode(obj->qepHandle[qep], QEPCTL_Pcrm_Max_Reset);
QEP_set_strobe_event_init(obj->qepHandle[qep], QEPCTL_Sei_Nothing);
QEP_set_index_event_init(obj->qepHandle[qep], QEPCTL_Iei_Nothing);
QEP_set_index_event_latch(obj->qepHandle[qep], QEPCTL_Iel_Rising_Edge);
QEP_set_soft_init(obj->qepHandle[qep], QEPCTL_Swi_Nothing);
QEP_disable_unit_timer(obj->qepHandle[qep]);
QEP_disable_watchdog(obj->qepHandle[qep]);
// setup the QPOSCTL register
QEP_disable_posn_compare(obj->qepHandle[qep]);
// setup the QCAPCTL register
QEP_disable_capture(obj->qepHandle[qep]);
// renable the position counter
QEP_enable_counter(obj->qepHandle[qep]);
return;
}
#endif
void HAL_setupSpiA(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
#ifdef DRV8353_SPI
SPI_reset(obj->spiAHandle);
SPI_setMode(obj->spiAHandle,SPI_Mode_Master);
SPI_setClkPolarity(obj->spiAHandle,SPI_ClkPolarity_OutputRisingEdge_InputFallingEdge);
SPI_enableTx(obj->spiAHandle);
SPI_enableTxFifoEnh(obj->spiAHandle);
SPI_enableTxFifo(obj->spiAHandle);
SPI_setTxDelay(obj->spiAHandle,0x0010);
SPI_setBaudRate(obj->spiAHandle,(SPI_BaudRate_e)(0x0010));
SPI_setCharLength(obj->spiAHandle,SPI_CharLength_16_Bits);
SPI_setSuspend(obj->spiAHandle,SPI_TxSuspend_free);
SPI_enable(obj->spiAHandle);
#endif
#ifdef DRV8301_SPI
SPI_reset(obj->spiAHandle);
SPI_setClkPolarity(obj->spiAHandle,SPI_ClkPolarity_OutputRisingEdge_InputFallingEdge);
SPI_disableLoopBack(obj->spiAHandle);
SPI_setCharLength(obj->spiAHandle,SPI_CharLength_16_Bits);
SPI_setMode(obj->spiAHandle,SPI_Mode_Slave);
SPI_setClkPhase(obj->spiAHandle,SPI_ClkPhase_Delayed);
SPI_enableTx(obj->spiAHandle);
SPI_enableChannels(obj->spiAHandle);
SPI_enableTxFifoEnh(obj->spiAHandle);
SPI_enableTxFifo(obj->spiAHandle);
SPI_setTxDelay(obj->spiAHandle,0);
SPI_clearTxFifoInt(obj->spiAHandle);
SPI_enableRxFifo(obj->spiAHandle);
//not needed for slave mode SPI_setBaudRate(obj->spiAHandle,(SPI_BaudRate_e)(0x000d));
SPI_setSuspend(obj->spiAHandle,SPI_TxSuspend_free);
SPI_enable(obj->spiAHandle);
#endif
return;
} // end of HAL_setupSpiA() function
void HAL_setupSpiB(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
SPI_reset(obj->spiBHandle);
SPI_setMode(obj->spiBHandle,SPI_Mode_Master);
SPI_setClkPolarity(obj->spiBHandle,SPI_ClkPolarity_OutputRisingEdge_InputFallingEdge);
SPI_enableTx(obj->spiBHandle);
SPI_enableTxFifoEnh(obj->spiBHandle);
SPI_enableTxFifo(obj->spiBHandle);
SPI_setTxDelay(obj->spiBHandle,0x0018);
SPI_setBaudRate(obj->spiBHandle,(SPI_BaudRate_e)(0x000d));
SPI_setCharLength(obj->spiBHandle,SPI_CharLength_16_Bits);
SPI_setSuspend(obj->spiBHandle,SPI_TxSuspend_free);
SPI_enable(obj->spiBHandle);
return;
} // end of HAL_setupSpiB() function
void HAL_setupPwmDacs(HAL_Handle handle)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint16_t halfPeriod_cycles = 512; // 3000->10kHz, 1500->20kHz, 1000-> 30kHz, 500->60kHz
uint_least8_t cnt;
for(cnt=0;cnt<3;cnt++)
{
// initialize the Time-Base Control Register (TBCTL)
PWMDAC_setCounterMode(obj->pwmDacHandle[cnt],PWM_CounterMode_UpDown);
PWMDAC_disableCounterLoad(obj->pwmDacHandle[cnt]);
PWMDAC_setPeriodLoad(obj->pwmDacHandle[cnt],PWM_PeriodLoad_Immediate);
PWMDAC_setSyncMode(obj->pwmDacHandle[cnt],PWM_SyncMode_EPWMxSYNC);
PWMDAC_setHighSpeedClkDiv(obj->pwmDacHandle[cnt],PWM_HspClkDiv_by_1);
PWMDAC_setClkDiv(obj->pwmDacHandle[cnt],PWM_ClkDiv_by_1);
PWMDAC_setPhaseDir(obj->pwmDacHandle[cnt],PWM_PhaseDir_CountUp);
PWMDAC_setRunMode(obj->pwmDacHandle[cnt],PWM_RunMode_FreeRun);
// initialize the Timer-Based Phase Register (TBPHS)
PWMDAC_setPhase(obj->pwmDacHandle[cnt],0);
// setup the Time-Base Counter Register (TBCTR)
PWMDAC_setCount(obj->pwmDacHandle[cnt],0);
// Initialize the Time-Base Period Register (TBPRD)
// set to zero initially
PWMDAC_setPeriod(obj->pwmDacHandle[cnt],0);
// initialize the Counter-Compare Control Register (CMPCTL)
PWMDAC_setLoadMode_CmpA(obj->pwmDacHandle[cnt],PWM_LoadMode_Zero);
PWMDAC_setLoadMode_CmpB(obj->pwmDacHandle[cnt],PWM_LoadMode_Zero);
PWMDAC_setShadowMode_CmpA(obj->pwmDacHandle[cnt],PWM_ShadowMode_Shadow);
PWMDAC_setShadowMode_CmpB(obj->pwmDacHandle[cnt],PWM_ShadowMode_Shadow);
// Initialize the Action-Qualifier Output A Register (AQCTLA)
PWMDAC_setActionQual_CntUp_CmpA_PwmA(obj->pwmDacHandle[cnt],PWM_ActionQual_Clear);
PWMDAC_setActionQual_CntDown_CmpA_PwmA(obj->pwmDacHandle[cnt],PWM_ActionQual_Set);
// account for EPWM6B
if(cnt == 0)
{
PWMDAC_setActionQual_CntUp_CmpB_PwmB(obj->pwmDacHandle[cnt],PWM_ActionQual_Clear);
PWMDAC_setActionQual_CntDown_CmpB_PwmB(obj->pwmDacHandle[cnt],PWM_ActionQual_Set);
}
// Initialize the Dead-Band Control Register (DBCTL)
PWMDAC_disableDeadBand(obj->pwmDacHandle[cnt]);
// Initialize the PWM-Chopper Control Register (PCCTL)
PWMDAC_disableChopping(obj->pwmDacHandle[cnt]);
// Initialize the Trip-Zone Control Register (TZSEL)
PWMDAC_disableTripZones(obj->pwmDacHandle[cnt]);
// Initialize the Trip-Zone Control Register (TZCTL)
PWMDAC_setTripZoneState_TZA(obj->pwmDacHandle[cnt],PWM_TripZoneState_HighImp);
PWMDAC_setTripZoneState_TZB(obj->pwmDacHandle[cnt],PWM_TripZoneState_HighImp);
PWMDAC_setTripZoneState_DCAEVT1(obj->pwmDacHandle[cnt],PWM_TripZoneState_HighImp);
PWMDAC_setTripZoneState_DCAEVT2(obj->pwmDacHandle[cnt],PWM_TripZoneState_HighImp);
PWMDAC_setTripZoneState_DCBEVT1(obj->pwmDacHandle[cnt],PWM_TripZoneState_HighImp);
}
// since the PWM is configured as an up/down counter, the period register is set to one-half
// of the desired PWM period
PWMDAC_setPeriod(obj->pwmDacHandle[PWMDAC_Number_1],halfPeriod_cycles); // Set period for both DAC1 and DAC2
PWMDAC_setPeriod(obj->pwmDacHandle[PWMDAC_Number_2],halfPeriod_cycles);
PWMDAC_setPeriod(obj->pwmDacHandle[PWMDAC_Number_3],halfPeriod_cycles);
return;
} // end of HAL_setupPwmDacs() function
void HAL_setupTimers(HAL_Handle handle,const float_t systemFreq_MHz)
{
HAL_Obj *obj = (HAL_Obj *)handle;
uint32_t timerPeriod_0p5ms = (uint32_t)(systemFreq_MHz * (float_t)500.0) - 1;
uint32_t timerPeriod_10ms = (uint32_t)(systemFreq_MHz * (float_t)10000.0) - 1;
// use timer 0 for frequency diagnostics
TIMER_setDecimationFactor(obj->timerHandle[0],0);
TIMER_setEmulationMode(obj->timerHandle[0],TIMER_EmulationMode_RunFree);
TIMER_setPeriod(obj->timerHandle[0],timerPeriod_0p5ms);
TIMER_setPreScaler(obj->timerHandle[0],0);
// use timer 1 for CPU usage diagnostics
TIMER_setDecimationFactor(obj->timerHandle[1],0);
TIMER_setEmulationMode(obj->timerHandle[1],TIMER_EmulationMode_RunFree);
TIMER_setPeriod(obj->timerHandle[1],timerPeriod_10ms);
TIMER_setPreScaler(obj->timerHandle[1],0);
// use timer 2 for CPU time diagnostics
TIMER_setDecimationFactor(obj->timerHandle[2],0);
TIMER_setEmulationMode(obj->timerHandle[2],TIMER_EmulationMode_RunFree);
TIMER_setPeriod(obj->timerHandle[2],0xFFFFFFFF);
TIMER_setPreScaler(obj->timerHandle[2],0);
return;
} // end of HAL_setupTimers() function
#ifdef DRV8353_SPI
void HAL_writeDrvData(HAL_Handle handle, DRV_SPI_8353_Vars_t *Spi_8353_Vars)
{
HAL_Obj *obj = (HAL_Obj *)handle;
DRV8353_writeData(obj->drv8353Handle,Spi_8353_Vars);
return;
} // end of HAL_writeDrvData() function
void HAL_readDrvData(HAL_Handle handle, DRV_SPI_8353_Vars_t *Spi_8353_Vars)
{
HAL_Obj *obj = (HAL_Obj *)handle;
DRV8353_readData(obj->drv8353Handle,Spi_8353_Vars);
return;
} // end of HAL_readDrvData() function
void HAL_setupDrvSpi(HAL_Handle handle, DRV_SPI_8353_Vars_t *Spi_8353_Vars)
{
HAL_Obj *obj = (HAL_Obj *)handle;
DRV8353_setupSpi(obj->drv8353Handle,Spi_8353_Vars);
return;
} // end of HAL_setupDrvSpi() function
#endif
#ifdef DRV8301_SPI
void HAL_writeDrvData(HAL_Handle handle, DRV_SPI_8301_Vars_t *Spi_8301_Vars)
{
HAL_Obj *obj = (HAL_Obj *)handle;
DRV8301_writeData(obj->drv8301Handle,Spi_8301_Vars);
return;
} // end of HAL_writeDrvData() function
void HAL_readDrvData(HAL_Handle handle, DRV_SPI_8301_Vars_t *Spi_8301_Vars)
{
HAL_Obj *obj = (HAL_Obj *)handle;
DRV8301_readData(obj->drv8301Handle,Spi_8301_Vars);
return;
} // end of HAL_readDrvData() function
void HAL_setupDrvSpi(HAL_Handle handle, DRV_SPI_8301_Vars_t *Spi_8301_Vars)
{
HAL_Obj *obj = (HAL_Obj *)handle;
DRV8301_setupSpi(obj->drv8301Handle,Spi_8301_Vars);
return;
} // end of HAL_setupDrvSpi() function
#endif
void HAL_setDacParameters(HAL_Handle handle, HAL_DacData_t *pDacData)
{
HAL_Obj *obj = (HAL_Obj *)handle;
pDacData->PeriodMax = PWMDAC_getPeriod(obj->pwmDacHandle[PWMDAC_Number_1]);
pDacData->offset[0] = _IQ(0.5);
pDacData->offset[1] = _IQ(0.5);
pDacData->offset[2] = _IQ(0.5);
pDacData->offset[3] = _IQ(0.0);
pDacData->gain[0] = _IQ(1.0);
pDacData->gain[1] = _IQ(1.0);
pDacData->gain[2] = _IQ(1.0);
pDacData->gain[3] = _IQ(1.0);
return;
} //end of HAL_setDacParameters() function
// end of file
/* --COPYRIGHT--,BSD
* Copyright (c) 2015, Texas Instruments Incorporated
* All rights reserved.
*xxx
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//! \file drivers/drvic/drv8305/src/32b/f28x/f2806x/drv8353.c
//! \brief Contains the various functions related to the DRV8353 object
//!
//! (C) Copyright 2015, Texas Instruments, Inc.
// MW_INSTALL_DIR
// ${PROJECT_LOC}\..\..\..\..\..\..\..\..\..\..
//
// **************************************************************************
// the includes
#include <math.h>
// **************************************************************************
// drivers
#include "sw/drivers/drvic/drv8353/src/32b/f28x/f2802x/drv8353.h"
// **************************************************************************
// modules
// **************************************************************************
// platforms
// **************************************************************************
// the defines
// **************************************************************************
// the globals
// **************************************************************************
// the function prototypes
DRV8353_Handle DRV8353_init(void *pMemory,const size_t numBytes)
{
DRV8353_Handle handle;
if(numBytes < sizeof(DRV8353_Obj))
return((DRV8353_Handle)NULL);
// assign the handle
handle = (DRV8353_Handle)pMemory;
DRV8353_resetRxTimeout(handle);
DRV8353_resetEnableTimeout(handle);
return(handle);
} // end of DRV8353_init() function
void DRV8353_enable(DRV8353_Handle handle)
{
DRV8353_Obj *obj = (DRV8353_Obj *)handle;
static volatile uint16_t enableWaitTimeOut;
uint16_t n = 0;
// Enable the DRV8353
GPIO_setHigh(obj->gpioHandle,obj->gpioNumber);
enableWaitTimeOut = 0;
#ifdef DRV8353_SPI
//if(gDeviceVariant)
//{
// Make sure the FAULT bit is not set during startup
while(((DRV8353_readSpi(handle, Address_Status_0) & DRV8353_STATUS00_FAULT_BITS) != 0) && (enableWaitTimeOut < 1000))
{
if (++enableWaitTimeOut > 999)
{
obj->enableTimeOut = true;
}
}
//}
//else
#endif
{
while(enableWaitTimeOut < 1000)
{
if (++enableWaitTimeOut > 999)
{
obj->enableTimeOut = true;
}
}
}
// Wait for the DRV8353 to go through start up sequence
for(n=0;n<0xffff;n++)
asm(" NOP");
return;
} // end of DRV8353_enable() function
#ifdef DRV8353_SPI
DRV8353_CTRL03_PeakSourCurHS_e DRV8353_getPeakSourCurHS(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_3);
// mask the bits
data &= DRV8353_CTRL03_IDRIVEP_HS_BITS;
return((DRV8353_CTRL03_PeakSourCurHS_e)data);
} // end of DRV8353_getPeakSourCurHS function
DRV8353_CTRL03_PeakSinkCurHS_e DRV8353_getPeakSinkCurHS(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_3);
// mask the bits
data &= DRV8353_CTRL03_IDRIVEN_HS_BITS;
return((DRV8353_CTRL03_PeakSinkCurHS_e)data);
} // end of DRV8353_getPeakSinkCurHS function
DRV8353_CTRL04_PeakTime_e DRV8353_getPeakSourTime(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_4);
// mask the bits
data &= DRV8353_CTRL04_TDRIVE_BITS;
return((DRV8353_CTRL04_PeakTime_e)data);
} // end of DRV8353_getPeakSourTime function
DRV8353_CTRL04_PeakSourCurLS_e DRV8353_getPeakSourCurLS(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_4);
// mask the bits
data &= DRV8353_CTRL04_IDRIVEP_LS_BITS;
return((DRV8353_CTRL04_PeakSourCurLS_e)data);
} // end of DRV8353_getPeakSourCurLS function
DRV8353_CTRL04_PeakSinkCurLS_e DRV8353_getPeakSinkCurLS(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_4);
// mask the bits
data &= DRV8353_CTRL04_IDRIVEN_LS_BITS;
return((DRV8353_CTRL04_PeakSinkCurLS_e)data);
} // end of DRV8353_getPeakSinkCurLS function
#endif
/*
DRV8353_CTRL04_PeakSinkTime_e DRV8353_getPeakSinkTime(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_4);
// mask the bits
data &= DRV8353_CTRL04_TDRIVE_BITS;
return((DRV8353_CTRL04_PeakSinkTime_e)data);
} // end of DRV8353_getPeakSinkTime function
*/
#ifdef DRV8353_SPI
DRV8353_CTRL05_OcpDeg_e DRV8353_getVDSDeglitch(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_5);
// mask the bits
data &= DRV8353_CTRL05_OCP_DEG_BITS;
return((DRV8353_CTRL05_OcpDeg_e)data);
} // end of DRV8353_getVDSDeglitch function
/*
DRV8305_CTRL07_VDSBlanking_e DRV8353_getVDSBlanking(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_7);
// mask the bits
data &= DRV8305_CTRL07_TBLANK_BITS;
return((DRV8305_CTRL07_VDSBlanking_e)data);
} // end of DRV8305_getVDSBlanking function
*/
DRV8353_CTRL05_DeadTime_e DRV8353_getDeadTime(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_5);
// mask the bits
data &= DRV8353_CTRL05_DEAD_TIME_BITS;
return((DRV8353_CTRL05_DeadTime_e)data);
} // end of DRV8353_getDeadTime function
DRV8353_CTRL02_PwmMode_e DRV8353_getPwmMode(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8353_readSpi(handle,Address_Control_2);
// mask the bits
data &= DRV8353_CTRL02_PWM_MODE_BITS;
return((DRV8353_CTRL02_PwmMode_e)data);
} // end of DRV8353_getPwmMode function
/*
DRV8305_CTRL07_CommOption_e DRV8353_getCommOption(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_7);
// mask the bits
data &= DRV8305_CTRL07_COMM_OPT_BITS;
return((DRV8305_CTRL07_CommOption_e)data);
} // end of DRV8305_getCommOption function
DRV8305_CTRL09_WatchDelay_e DRV8353_getWatchDelay(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_9);
// mask the bits
data &= DRV8305_CTRL09_WD_DLY_BITS;
return((DRV8305_CTRL09_WatchDelay_e)data);
} // end of DRV8305_getWatchDelay function
DRV8305_CTRL0A_CSGain1_e DRV8353_getCSGain1(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// mask the bits
data &= DRV8305_CTRL0A_GAIN_CS1_BITS;
return((DRV8305_CTRL0A_CSGain1_e)data);
} // end of DRV8305_getCSGain1 function
DRV8305_CTRL0A_CSGain2_e DRV8353_getCSGain2(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// mask the bits
data &= DRV8305_CTRL0A_GAIN_CS2_BITS;
return((DRV8305_CTRL0A_CSGain2_e)data);
} // end of DRV8305_getCSGain2 function
DRV8305_CTRL0A_CSGain3_e DRV8353_getCSGain3(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// mask the bits
data &= DRV8305_CTRL0A_GAIN_CS3_BITS;
return((DRV8305_CTRL0A_CSGain3_e)data);
} // end of DRV8305_getCSGain3 function
DRV8305_CTRL0A_CSBlank_e DRV8353_getCSBlank(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// mask the bits
data &= DRV8305_CTRL0A_CS_BLANK_BITS;
return((DRV8305_CTRL0A_CSBlank_e)data);
} // end of DRV8305_getCSBlank function
DRV8305_CTRL0A_DcCalMode_e DRV8353_getDcCalMode(DRV8353_Handle handle,const DRV8305_ShuntAmpNumber_e ampNumber)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// mask the bits
if(ampNumber == ShuntAmpNumber_1)
{
data &= DRV8305_CTRL0A_DC_CAL_CH1_BITS;
}
else if(ampNumber == ShuntAmpNumber_2)
{
data &= DRV8305_CTRL0A_DC_CAL_CH2_BITS;
}
else if(ampNumber == ShuntAmpNumber_3)
{
data &= DRV8305_CTRL0A_DC_CAL_CH3_BITS;
}
return((DRV8305_CTRL0A_DcCalMode_e)data);
} // end of DRV8305_getDcCalMode() function
DRV8305_CTRL0B_VregUvLevel_e DRV8353_getVregUvLevel(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_B);
// mask the bits
data &= DRV8305_CTRL0B_VREG_UV_LEVEL_BITS;
return((DRV8305_CTRL0B_VregUvLevel_e)data);
} // end of DRV8305_getVregUvLevel function
DRV8305_CTRL0B_SleepDelay_e DRV8353_getSleepDelay(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_B);
// mask the bits
data &= DRV8305_CTRL0B_SLP_DLY_BITS;
return((DRV8305_CTRL0B_SleepDelay_e)data);
} // end of DRV8305_getSleepDelay function
DRV8305_CTRL0B_VrefScaling_e DRV8353_getVrefScaling(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_B);
// mask the bits
data &= DRV8305_CTRL0B_VREF_SCALING_BITS;
return((DRV8305_CTRL0B_VrefScaling_e)data);
} // end of DRV8305_getVrefScaling function
DRV8305_CTRL0C_VDSMode_e DRV8353_getVDSMode(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_C);
// mask the bits
data &= DRV8305_CTRL0C_VDS_MODE_BITS;
return((DRV8305_CTRL0C_VDSMode_e)data);
} // end of DRV8305_getVDSMode function
DRV8305_CTRL0C_VDSLevel_e DRV8353_getVDSLevel(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_C);
// mask the bits
data &= DRV8305_CTRL0C_VDS_LEVEL_BITS;
return((DRV8305_CTRL0C_VDSLevel_e)data);
} // end of DRV8305_getVDSLevel function
*/
void DRV8353_setSpiHandle(DRV8353_Handle handle,SPI_Handle spiHandle)
{
DRV8353_Obj *obj = (DRV8353_Obj *)handle;
// initialize the serial peripheral interface object
obj->spiHandle = spiHandle;
return;
} // end of DRV8353_setSpiHandle() function
#endif
void DRV8353_setGpioHandle(DRV8353_Handle handle,GPIO_Handle gpioHandle)
{
DRV8353_Obj *obj = (DRV8353_Obj *)handle;
// initialize the gpio interface object
obj->gpioHandle = gpioHandle;
return;
} // end of DRV8353_setGpioHandle() function
void DRV8353_setGpioNumber(DRV8353_Handle handle,GPIO_Number_e gpioNumber)
{
DRV8353_Obj *obj = (DRV8353_Obj *)handle;
// initialize the gpio interface object
obj->gpioNumber = gpioNumber;
return;
} // end of DRV8353_setGpioNumber() function
/*
void DRV8305_setPeakSourCurHS(DRV8353_Handle handle,const DRV8305_CTRL05_PeakSourCurHS_e level)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_5);
// clear the bits
data &= (~DRV8305_CTRL05_IDRIVEP_HS_BITS);
// set the bits
data |= level;
// write the data
DRV8305_writeSpi(handle,Address_Control_5,data);
return;
} // end of DRV8305_setPeakSourCurHS() function
void DRV8305_setPeakSinkCurHS(DRV8353_Handle handle,const DRV8305_CTRL05_PeakSinkCurHS_e level)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_5);
// clear the bits
data &= (~DRV8305_CTRL05_IDRIVEN_HS_BITS);
// set the bits
data |= level;
// write the data
DRV8305_writeSpi(handle,Address_Control_5,data);
return;
} // end of DRV8305_setPeakSinkCurHS() function
void DRV8305_setPeakSourTime(DRV8353_Handle handle,const DRV8305_CTRL05_PeakSourTime_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_5);
// clear the bits
data &= (~DRV8305_CTRL05_TDRIVEN_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_5,data);
return;
} // end of DRV8305_setPeakSourTime() function
void DRV8305_setPeakSinkCurLS(DRV8353_Handle handle,const DRV8305_CTRL06_PeakSinkCurLS_e level)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_6);
// clear the bits
data &= (~DRV8305_CTRL06_IDRIVEP_LS_BITS);
// set the bits
data |= level;
// write the data
DRV8305_writeSpi(handle,Address_Control_6,data);
return;
} // end of DRV8305_setPeakSinkCurLS() function
void DRV8305_setPeakSinkTime(DRV8353_Handle handle,const DRV8305_CTRL06_PeakSinkTime_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_6);
// clear the bits
data &= (~DRV8305_CTRL06_TDRIVEP_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_6,data);
return;
} // end of DRV8305_setPeakSinkTime() function
void DRV8305_setVDSDeglitch(DRV8353_Handle handle,const DRV8305_CTRL07_VDSDeglitch_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_7);
// clear the bits
data &= (~DRV8305_CTRL07_TVDS_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_7,data);
return;
} // end of DRV8305_setVDSDeglitch() function
void DRV8305_setVDSBlanking(DRV8353_Handle handle,const DRV8305_CTRL07_VDSBlanking_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_7);
// clear the bits
data &= (~DRV8305_CTRL07_TBLANK_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_7,data);
return;
} // end of DRV8305_setVDSBlanking() function
void DRV8305_setDeadTime(DRV8353_Handle handle,const DRV8305_CTRL07_DeadTime_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_7);
// clear the bits
data &= (~DRV8305_CTRL07_DEAD_TIME_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_7,data);
return;
} // end of DRV8305_setDeadTime() function
void DRV8305_setPwmMode(DRV8353_Handle handle,const DRV8305_CTRL07_PwmMode_e mode)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_7);
// clear the bits
data &= (~DRV8305_CTRL07_PWM_MODE_BITS);
// set the bits
data |= mode;
// write the data
DRV8305_writeSpi(handle,Address_Control_7,data);
return;
} // end of DRV8305_setPwmMode() function
void DRV8305_setCommOption(DRV8353_Handle handle,const DRV8305_CTRL07_CommOption_e mode)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_7);
// clear the bits
data &= (~DRV8305_CTRL07_COMM_OPT_BITS);
// set the bits
data |= mode;
// write the data
DRV8305_writeSpi(handle,Address_Control_7,data);
return;
} // end of DRV8305_setCommOption() function
void DRV8305_setWatchDelay(DRV8353_Handle handle,const DRV8305_CTRL09_WatchDelay_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_9);
// clear the bits
data &= (~DRV8305_CTRL09_WD_DLY_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_9,data);
return;
} // end of DRV8305_setWatchDelay() function
void DRV8305_setCSGain1(DRV8353_Handle handle,const DRV8305_CTRL0A_CSGain1_e gain)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// clear the bits
data &= (~DRV8305_CTRL0A_GAIN_CS1_BITS);
// set the bits
data |= gain;
// write the data
DRV8305_writeSpi(handle,Address_Control_A,data);
return;
} // end of DRV8305_setCSGain1() function
void DRV8305_setCSGain2(DRV8353_Handle handle,const DRV8305_CTRL0A_CSGain2_e gain)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// clear the bits
data &= (~DRV8305_CTRL0A_GAIN_CS2_BITS);
// set the bits
data |= gain;
// write the data
DRV8305_writeSpi(handle,Address_Control_A,data);
return;
} // end of DRV8305_setCSGain2() function
void DRV8305_setCSGain3(DRV8353_Handle handle,const DRV8305_CTRL0A_CSGain3_e gain)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// clear the bits
data &= (~DRV8305_CTRL0A_GAIN_CS3_BITS);
// set the bits
data |= gain;
// write the data
DRV8305_writeSpi(handle,Address_Control_A,data);
return;
} // end of DRV8305_setCSGain3() function
void DRV8305_setCSBlank(DRV8353_Handle handle,const DRV8305_CTRL0A_CSBlank_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// clear the bits
data &= (~DRV8305_CTRL0A_CS_BLANK_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_A,data);
return;
} // end of DRV8305_setCSBlank() function
void DRV8305_setDcCalMode(DRV8353_Handle handle,const DRV8305_ShuntAmpNumber_e ampNumber,const DRV8305_CTRL0A_DcCalMode_e mode)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_A);
// clear the bits
if(ampNumber == ShuntAmpNumber_1)
{
data &= (~DRV8305_CTRL0A_DC_CAL_CH1_BITS);
}
else if(ampNumber == ShuntAmpNumber_2)
{
data &= (~DRV8305_CTRL0A_DC_CAL_CH2_BITS);
}
else if(ampNumber == ShuntAmpNumber_3)
{
data &= (~DRV8305_CTRL0A_DC_CAL_CH3_BITS);
}
// set the bits
data |= mode;
// write the data
DRV8305_writeSpi(handle,Address_Control_A,data);
return;
} // end of DRV8305_setDcCalMode() function
void DRV8305_setVregUvLevel(DRV8353_Handle handle,const DRV8305_CTRL0B_VregUvLevel_e level)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_B);
// clear the bits
data &= (~DRV8305_CTRL0B_VREG_UV_LEVEL_BITS);
// set the bits
data |= level;
// write the data
DRV8305_writeSpi(handle,Address_Control_B,data);
return;
} // end of DRV8305_setVregUvLevel() function
void DRV8305_setSleepDelay(DRV8353_Handle handle,const DRV8305_CTRL0B_SleepDelay_e time)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_B);
// clear the bits
data &= (~DRV8305_CTRL0B_SLP_DLY_BITS);
// set the bits
data |= time;
// write the data
DRV8305_writeSpi(handle,Address_Control_B,data);
return;
} // end of DRV8305_setSleepDelay() function
void DRV8305_setVrefScaling(DRV8353_Handle handle,const DRV8305_CTRL0B_VrefScaling_e mode)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_B);
// clear the bits
data &= (~DRV8305_CTRL0B_VREF_SCALING_BITS);
// set the bits
data |= mode;
// write the data
DRV8305_writeSpi(handle,Address_Control_B,data);
return;
} // end of DRV8305_setVrefScaling() function
void DRV8305_setVDSMode(DRV8353_Handle handle,const DRV8305_CTRL0C_VDSMode_e mode)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_C);
// clear the bits
data &= (~DRV8305_CTRL0C_VDS_MODE_BITS);
// set the bits
data |= mode;
// write the data
DRV8305_writeSpi(handle,Address_Control_C,data);
return;
} // end of DRV8305_setVDSMode() function
void DRV8305_setVDSLevel(DRV8353_Handle handle,const DRV8305_CTRL0C_VDSLevel_e level)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_C);
// clear the bits
data &= (~DRV8305_CTRL0C_VDS_LEVEL_BITS);
// set the bits
data |= level;
// write the data
DRV8305_writeSpi(handle,Address_Control_C,data);
return;
} // end of DRV8305_setVDSLevel() function
bool DRV8305_isFault(DRV8353_Handle handle)
{
DRV8305_Word_t readWord;
bool status=false;
// read the data
readWord = DRV8305_readSpi(handle,Address_Status_1);
if(readWord & DRV8305_STATUS01_FAULT_BITS)
{
status = true;
}
return(status);
} // end of DRV8305_isFault() function
void DRV8305_reset(DRV8353_Handle handle)
{
uint16_t data;
// read data
data = DRV8305_readSpi(handle,Address_Control_9);
// set the bits
data |= DRV8305_CTRL09_CLR_FLTS_BITS;
// write the data
DRV8305_writeSpi(handle,Address_Control_9,data);
return;
} // end of DRV8305_reset() function
*/
#ifdef DRV8353_SPI
void DRV8353_setupSpi(DRV8353_Handle handle, DRV_SPI_8353_Vars_t *Spi_8353_Vars)
{
DRV8353_Address_e drvRegAddr;
uint16_t drvDataNew;
// Set Default Values
// Manual Read/Write
Spi_8353_Vars->ManReadAddr = 0;
Spi_8353_Vars->ManReadData = 0;
Spi_8353_Vars->ManReadCmd = false;
Spi_8353_Vars->ManWriteAddr = 0;
Spi_8353_Vars->ManWriteData = 0;
Spi_8353_Vars->ManWriteCmd = false;
// Read/Write
Spi_8353_Vars->ReadCmd = false;
Spi_8353_Vars->WriteCmd = true;
// Read registers for default values
// Read Status Register 0
drvRegAddr = Address_Status_0;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Stat_Reg_00.VDS_LC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_LC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_HC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_HC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_LB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_LB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_HB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_HB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_LA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_LA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_HA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_HA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.OTSD = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_OTSD_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.UVLO = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_UVLO_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.GDF = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_GDF_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_OCP = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_OCP_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.FAULT = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_FAULT_BITS)?1:0;
// Read Status Register 1
drvRegAddr = Address_Status_1;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Stat_Reg_01.VGS_LC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_LC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_HC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_HC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_LB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_LB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_HB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_HB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_LA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_LA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_HA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_HA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.GDUV = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_GDUV_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.OTW = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_OTW_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.SC_OC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_SC_OC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.SB_OC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_SB_OC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.SA_OC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_SA_OC_BITS)?1:0;
// Read Control Register 2
drvRegAddr = Address_Control_2;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_02.CLR_FLT = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_CLR_FLT_BITS);
Spi_8353_Vars->Ctrl_Reg_02.BRAKE = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_BRAKE_BITS);
Spi_8353_Vars->Ctrl_Reg_02.COAST = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_COAST_BITS);
Spi_8353_Vars->Ctrl_Reg_02.PWM1_DIR = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_PWM1_DIR_BITS);
Spi_8353_Vars->Ctrl_Reg_02.PWM1_COM = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_PWM1_COM_BITS);
Spi_8353_Vars->Ctrl_Reg_02.PWM_MODE = (DRV8353_CTRL02_PwmMode_e)(drvDataNew & (uint16_t)DRV8353_CTRL02_PWM_MODE_BITS);
Spi_8353_Vars->Ctrl_Reg_02.OTW_REP = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_OTW_REP_BITS);
Spi_8353_Vars->Ctrl_Reg_02.DIS_GDF = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_DIS_GDF_BITS);
Spi_8353_Vars->Ctrl_Reg_02.DIS_CPUV = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_DIS_CPUV_BITS);
Spi_8353_Vars->Ctrl_Reg_02.OCP_ACT = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_OCP_ACT)?1:0;
// Read Control Register 3
drvRegAddr = Address_Control_3;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_03.IDRIVEN_HS = (DRV8353_CTRL03_PeakSinkCurHS_e)(drvDataNew & (uint16_t)DRV8353_CTRL03_IDRIVEN_HS_BITS);
Spi_8353_Vars->Ctrl_Reg_03.IDRIVEP_HS = (DRV8353_CTRL03_PeakSourCurHS_e)(drvDataNew & (uint16_t)DRV8353_CTRL03_IDRIVEP_HS_BITS);
Spi_8353_Vars->Ctrl_Reg_03.LOCK = (DRV8353_CTRL03_Lock_e)(drvDataNew & (uint16_t)DRV8353_CTRL03_LOCK_BITS);
// Read Control Register 4
drvRegAddr = Address_Control_4;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_04.IDRIVEN_LS = (DRV8353_CTRL04_PeakSinkCurLS_e)(drvDataNew & (uint16_t)DRV8353_CTRL04_IDRIVEN_LS_BITS);
Spi_8353_Vars->Ctrl_Reg_04.IDRIVEP_LS = (DRV8353_CTRL04_PeakSourCurLS_e)(drvDataNew & (uint16_t)DRV8353_CTRL04_IDRIVEP_LS_BITS);
Spi_8353_Vars->Ctrl_Reg_04.TDRIVE = (DRV8353_CTRL04_PeakTime_e)(drvDataNew & (uint16_t)DRV8353_CTRL04_TDRIVE_BITS);
Spi_8353_Vars->Ctrl_Reg_04.CBC = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL04_CBC_BITS)?1:0;
// Read Control Register 5
drvRegAddr = Address_Control_5;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_05.VDS_LVL = (DRV8353_CTRL05_VDSLVL_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_VDS_LVL_BITS);
Spi_8353_Vars->Ctrl_Reg_05.OCP_DEG = (DRV8353_CTRL05_OcpDeg_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_OCP_DEG_BITS);
Spi_8353_Vars->Ctrl_Reg_05.OCP_MODE = (DRV8353_CTRL05_OcpMode_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_OCP_MODE_BITS);
Spi_8353_Vars->Ctrl_Reg_05.DEAD_TIME = (DRV8353_CTRL05_DeadTime_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_DEAD_TIME_BITS);
Spi_8353_Vars->Ctrl_Reg_05.TRETRY = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL05_TRETRY_BITS);
// Read Control Register 6
drvRegAddr = Address_Control_6;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_06.SEN_LVL = (DRV8353_CTRL06_SENLevel_e)(drvDataNew & (uint16_t)DRV8353_CTRL06_SEN_LVL_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_C = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_CAL_C_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_B = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_CAL_B_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_A = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_CAL_A_BITS);
Spi_8353_Vars->Ctrl_Reg_06.DIS_SEN = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_DIS_SEN_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_GAIN = (DRV8353_CTRL06_CSAGain_e)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_GAIN_BITS);
Spi_8353_Vars->Ctrl_Reg_06.LS_REF = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_LS_REF_BITS);
Spi_8353_Vars->Ctrl_Reg_06.VREF_DIV = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_VREF_DIV_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_FET = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_FET_BITS);
// Read Control Register 7
drvRegAddr = Address_Control_7;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_07.CAL_MODE = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_CAL_MODE_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_1 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED1_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_2 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED2_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_3 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED3_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_4 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED4_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_5 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED5_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_6 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED6_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_7 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED7_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_8 = (bool)(drvDataNew & (uint16_t)DRV8335_CTRL07_RESERVED8_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_9 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED9_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_10 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED10_BITS);
return;
} // end of DRV8353_setupSpi() function
uint16_t DRV8353_readSpi(DRV8353_Handle handle,const DRV8353_Address_e regAddr)
{
DRV8353_Obj *obj = (DRV8353_Obj *)handle;
uint16_t ctrlWord;
uint16_t n;
const uint16_t data = 0;
volatile uint16_t readWord;
static volatile uint16_t WaitTimeOut = 0;
volatile SPI_FifoStatus_e RxFifoCnt = SPI_FifoStatus_Empty;
// build the control word
ctrlWord = (uint16_t)DRV8353_buildCtrlWord(CtrlMode_Read,regAddr,data);
// reset the Rx fifo pointer to zero
SPI_resetRxFifo(obj->spiHandle);
SPI_enableRxFifo(obj->spiHandle);
GPIO_setLow(obj->gpioHandle, GPIO_Number_19);
// wait for registers to update
for(n=0;n<0x06;n++)
asm(" NOP");
// write the command
SPI_write(obj->spiHandle,ctrlWord);
// dummy write to return the reply from the 8301
SPI_write(obj->spiHandle,0x0000);
// wait for the response to populate the RX fifo, else a wait timeout will occur
while((RxFifoCnt < SPI_FifoStatus_2_Words) && (WaitTimeOut < 0xffff))
{
RxFifoCnt = SPI_getRxFifoStatus(obj->spiHandle);
if(++WaitTimeOut > 0xfffe)
{
obj->RxTimeOut = true;
//WaitTimeOut = 0;
}
}
GPIO_setHigh(obj->gpioHandle, GPIO_Number_19);
// Read the word
readWord = SPI_read(obj->spiHandle);
//readWord = SPI_read(obj->spiHandle);
return(readWord & DRV8353_DATA_MASK);
} // end of DRV8353_readSpi() function
//TODO:
void DRV8353_writeSpi(DRV8353_Handle handle,const DRV8353_Address_e regAddr,const uint16_t data)
{
DRV8353_Obj *obj = (DRV8353_Obj *)handle;
uint16_t ctrlWord;
uint16_t n;
// build the control word
ctrlWord = (uint16_t)DRV8353_buildCtrlWord(CtrlMode_Write,regAddr,data);
// reset the Rx fifo pointer to zero
SPI_resetRxFifo(obj->spiHandle);
SPI_enableRxFifo(obj->spiHandle);
GPIO_setLow(obj->gpioHandle, GPIO_Number_19);
// wait for GPIO
for(n=0;n<0x06;n++)
asm(" NOP");
// write the command
SPI_write(obj->spiHandle,ctrlWord);
// wait for registers to update
for(n=0;n<0xF0;n++)
asm(" NOP");
GPIO_setHigh(obj->gpioHandle, GPIO_Number_19);
return;
} // end of DRV8353_writeSpi() function
// TODO:
void DRV8353_writeData(DRV8353_Handle handle, DRV_SPI_8353_Vars_t *Spi_8353_Vars)
{
DRV8353_Address_e drvRegAddr = Address_Status_0;
uint16_t drvDataNew = 0;
/*Spi_8353_Vars->Ctrl_Reg_04.IDRIVEN_LS = 3;
Spi_8353_Vars->Ctrl_Reg_04.IDRIVEP_LS = 3 << 4;
Spi_8353_Vars->Ctrl_Reg_03.IDRIVEN_HS = 3;
Spi_8353_Vars->Ctrl_Reg_03.IDRIVEP_HS = 3 << 4;*/
//Spi_8353_Vars->Ctrl_Reg_06.CSA_GAIN =
if(Spi_8353_Vars->WriteCmd)
{
// Spi_8353_Vars->Ctrl_Reg_04.IDRIVEN_LS = ISink_LS_0p100_A;
// Spi_8353_Vars->Ctrl_Reg_04.IDRIVEP_LS = ISour_LS_0p050_A;
// Spi_8353_Vars->Ctrl_Reg_03.IDRIVEN_HS = ISink_HS_0p100_A;
// Spi_8353_Vars->Ctrl_Reg_03.IDRIVEP_HS = ISour_HS_0p050_A;
Spi_8353_Vars->Ctrl_Reg_06.CSA_GAIN = Gain_10VpV;
//Spi_8353_Vars->Ctrl_Reg_05.DEAD_TIME = DeadTime_50_ns;
// Write Control Register 2
drvRegAddr = Address_Control_2;
drvDataNew = (Spi_8353_Vars->Ctrl_Reg_02.CLR_FLT << 0) | \
(Spi_8353_Vars->Ctrl_Reg_02.BRAKE << 1) | \
(Spi_8353_Vars->Ctrl_Reg_02.COAST <<2) | \
(Spi_8353_Vars->Ctrl_Reg_02.PWM1_DIR << 3) | \
(Spi_8353_Vars->Ctrl_Reg_02.PWM1_COM << 4) | \
(Spi_8353_Vars->Ctrl_Reg_02.PWM_MODE) | \
(Spi_8353_Vars->Ctrl_Reg_02.OTW_REP << 7) | \
(Spi_8353_Vars->Ctrl_Reg_02.DIS_GDF << 8) | \
(Spi_8353_Vars->Ctrl_Reg_02.DIS_CPUV <<9) | \
(Spi_8353_Vars->Ctrl_Reg_02.OCP_ACT << 10);
DRV8353_writeSpi(handle,drvRegAddr,drvDataNew);
// Write Control Register 3
drvRegAddr = Address_Control_3;
drvDataNew = (Spi_8353_Vars->Ctrl_Reg_03.IDRIVEN_HS) | \
(Spi_8353_Vars->Ctrl_Reg_03.IDRIVEP_HS) | \
(Spi_8353_Vars->Ctrl_Reg_03.LOCK);
DRV8353_writeSpi(handle,drvRegAddr,drvDataNew);
// Write Control Register 4
drvRegAddr = Address_Control_4;
drvDataNew = (Spi_8353_Vars->Ctrl_Reg_04.IDRIVEN_LS) | \
(Spi_8353_Vars->Ctrl_Reg_04.IDRIVEP_LS) | \
(Spi_8353_Vars->Ctrl_Reg_04.TDRIVE) | \
(Spi_8353_Vars->Ctrl_Reg_04.CBC << 10);
DRV8353_writeSpi(handle,drvRegAddr,drvDataNew);
// Write Control Register 5
drvRegAddr = Address_Control_5;
drvDataNew = (Spi_8353_Vars->Ctrl_Reg_05.VDS_LVL) | \
(Spi_8353_Vars->Ctrl_Reg_05.OCP_DEG) | \
(Spi_8353_Vars->Ctrl_Reg_05.OCP_MODE) | \
(Spi_8353_Vars->Ctrl_Reg_05.DEAD_TIME) | \
(Spi_8353_Vars->Ctrl_Reg_05.TRETRY << 10);
DRV8353_writeSpi(handle,drvRegAddr,drvDataNew);
// Write Control Register 6
drvRegAddr = Address_Control_6;
drvDataNew = (Spi_8353_Vars->Ctrl_Reg_06.SEN_LVL) | \
(Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_C << 2) | \
(Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_B << 3) | \
(Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_A << 4) | \
(Spi_8353_Vars->Ctrl_Reg_06.DIS_SEN << 5) | \
(Spi_8353_Vars->Ctrl_Reg_06.CSA_GAIN) | \
(Spi_8353_Vars->Ctrl_Reg_06.LS_REF << 8) | \
(Spi_8353_Vars->Ctrl_Reg_06.VREF_DIV << 9) | \
(Spi_8353_Vars->Ctrl_Reg_06.CSA_FET << 10);
DRV8353_writeSpi(handle,drvRegAddr,drvDataNew);
// Write Control Register 7
drvRegAddr = Address_Control_7;
drvDataNew = (Spi_8353_Vars->Ctrl_Reg_07.CAL_MODE) << 0 | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_1 << 1) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_2 << 2) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_3 << 3) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_4 << 4) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_5 << 5) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_6 << 6) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_7 << 7) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_8 << 8) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_9 << 9) | \
(Spi_8353_Vars->Ctrl_Reg_07.RESERVED_10 << 10) ;
DRV8353_writeSpi(handle,drvRegAddr,drvDataNew);
Spi_8353_Vars->WriteCmd = false;
}
// Manual write to the DRV8353
if(Spi_8353_Vars->ManWriteCmd)
{
// Custom Write
drvRegAddr = (DRV8353_Address_e)(Spi_8353_Vars->ManWriteAddr << 11);
drvDataNew = Spi_8353_Vars->ManWriteData;
DRV8353_writeSpi(handle,drvRegAddr,drvDataNew);
drvDataNew = 0;
Spi_8353_Vars->ManWriteCmd = false;
}
return;
} // end of DRV8353_writeData() function
void DRV8353_readData(DRV8353_Handle handle, DRV_SPI_8353_Vars_t *Spi_8353_Vars)
{
DRV8353_Address_e drvRegAddr;
uint16_t drvDataNew;
if(Spi_8353_Vars->ReadCmd)
{
// Read registers for default values
// Read Status Register 0
drvRegAddr = Address_Status_0;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Stat_Reg_00.VDS_LC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_LC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_HC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_HC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_LB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_LB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_HB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_HB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_LA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_LA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_HA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_HA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.OTSD = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_OTSD_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.UVLO = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_UVLO_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.GDF = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_GDF_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.VDS_OCP = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_VDS_OCP_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_00.FAULT = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS00_FAULT_BITS)?1:0;
// Read Status Register 1
drvRegAddr = Address_Status_1;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Stat_Reg_01.VGS_LC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_LC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_HC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_HC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_LB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_LB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_HB = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_HB_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_LA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_LA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.VGS_HA = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_VGS_HA_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.GDUV = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_GDUV_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.OTW = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_OTW_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.SC_OC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_SC_OC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.SB_OC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_SB_OC_BITS)?1:0;
Spi_8353_Vars->Stat_Reg_01.SA_OC = (bool)(drvDataNew & (uint16_t)DRV8353_STATUS01_SA_OC_BITS)?1:0;
// Read Control Register 2
drvRegAddr = Address_Control_2;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_02.CLR_FLT = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_CLR_FLT_BITS);
Spi_8353_Vars->Ctrl_Reg_02.BRAKE = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_BRAKE_BITS);
Spi_8353_Vars->Ctrl_Reg_02.COAST = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_COAST_BITS);
Spi_8353_Vars->Ctrl_Reg_02.PWM1_DIR = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_PWM1_DIR_BITS);
Spi_8353_Vars->Ctrl_Reg_02.PWM1_COM = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_PWM1_COM_BITS);
Spi_8353_Vars->Ctrl_Reg_02.PWM_MODE = (DRV8353_CTRL02_PwmMode_e)(drvDataNew & (uint16_t)DRV8353_CTRL02_PWM_MODE_BITS);
Spi_8353_Vars->Ctrl_Reg_02.OTW_REP = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_OTW_REP_BITS);
Spi_8353_Vars->Ctrl_Reg_02.DIS_GDF = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_DIS_GDF_BITS);
Spi_8353_Vars->Ctrl_Reg_02.DIS_CPUV = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_DIS_CPUV_BITS);
Spi_8353_Vars->Ctrl_Reg_02.OCP_ACT = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL02_OCP_ACT)?1:0;
// Read Control Register 3
drvRegAddr = Address_Control_3;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_03.IDRIVEN_HS = (DRV8353_CTRL03_PeakSinkCurHS_e)(drvDataNew & (uint16_t)DRV8353_CTRL03_IDRIVEN_HS_BITS);
Spi_8353_Vars->Ctrl_Reg_03.IDRIVEP_HS = (DRV8353_CTRL03_PeakSourCurHS_e)(drvDataNew & (uint16_t)DRV8353_CTRL03_IDRIVEP_HS_BITS);
Spi_8353_Vars->Ctrl_Reg_03.LOCK = (DRV8353_CTRL03_Lock_e)(drvDataNew & (uint16_t)DRV8353_CTRL03_LOCK_BITS);
// Read Control Register 4
drvRegAddr = Address_Control_4;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_04.IDRIVEN_LS = (DRV8353_CTRL04_PeakSinkCurLS_e)(drvDataNew & (uint16_t)DRV8353_CTRL04_IDRIVEN_LS_BITS);
Spi_8353_Vars->Ctrl_Reg_04.IDRIVEP_LS = (DRV8353_CTRL04_PeakSourCurLS_e)(drvDataNew & (uint16_t)DRV8353_CTRL04_IDRIVEP_LS_BITS);
Spi_8353_Vars->Ctrl_Reg_04.TDRIVE = (DRV8353_CTRL04_PeakTime_e)(drvDataNew & (uint16_t)DRV8353_CTRL04_TDRIVE_BITS);
Spi_8353_Vars->Ctrl_Reg_04.CBC = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL04_CBC_BITS)?1:0;
// Read Control Register 5
drvRegAddr = Address_Control_5;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_05.VDS_LVL = (DRV8353_CTRL05_VDSLVL_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_VDS_LVL_BITS);
Spi_8353_Vars->Ctrl_Reg_05.OCP_DEG = (DRV8353_CTRL05_OcpDeg_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_OCP_DEG_BITS);
Spi_8353_Vars->Ctrl_Reg_05.OCP_MODE = (DRV8353_CTRL05_OcpMode_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_OCP_MODE_BITS);
Spi_8353_Vars->Ctrl_Reg_05.DEAD_TIME = (DRV8353_CTRL05_DeadTime_e)(drvDataNew & (uint16_t)DRV8353_CTRL05_DEAD_TIME_BITS);
Spi_8353_Vars->Ctrl_Reg_05.TRETRY = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL05_TRETRY_BITS);
// Read Control Register 6
drvRegAddr = Address_Control_6;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_06.SEN_LVL = (DRV8353_CTRL06_SENLevel_e)(drvDataNew & (uint16_t)DRV8353_CTRL06_SEN_LVL_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_C = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_CAL_C_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_B = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_CAL_B_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_CAL_A = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_CAL_A_BITS);
Spi_8353_Vars->Ctrl_Reg_06.DIS_SEN = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_DIS_SEN_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_GAIN = (DRV8353_CTRL06_CSAGain_e)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_GAIN_BITS);
Spi_8353_Vars->Ctrl_Reg_06.LS_REF = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_LS_REF_BITS);
Spi_8353_Vars->Ctrl_Reg_06.VREF_DIV = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_VREF_DIV_BITS);
Spi_8353_Vars->Ctrl_Reg_06.CSA_FET = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL06_CSA_FET_BITS);
// Read Control Register 7
drvRegAddr = Address_Control_7;
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->Ctrl_Reg_07.CAL_MODE = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_CAL_MODE_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_1 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED1_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_2 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED2_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_3 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED3_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_4 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED4_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_5 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED5_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_6 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED6_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_7 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED7_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_8 = (bool)(drvDataNew & (uint16_t)DRV8335_CTRL07_RESERVED8_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_9 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED9_BITS);
Spi_8353_Vars->Ctrl_Reg_07.RESERVED_10 = (bool)(drvDataNew & (uint16_t)DRV8353_CTRL07_RESERVED10_BITS);
Spi_8353_Vars->ReadCmd = false;
}
// Manual read from the DRV8353
if(Spi_8353_Vars->ManReadCmd)
{
// Custom Read
drvRegAddr = (DRV8353_Address_e)(Spi_8353_Vars->ManReadAddr << 11);
drvDataNew = DRV8353_readSpi(handle,drvRegAddr);
Spi_8353_Vars->ManReadData = drvDataNew;
Spi_8353_Vars->ManReadCmd = false;
}
return;
} // end of DRV8353_readData() function
#endif
// end of file