


Part Number: TMS320F28069M
Hello,
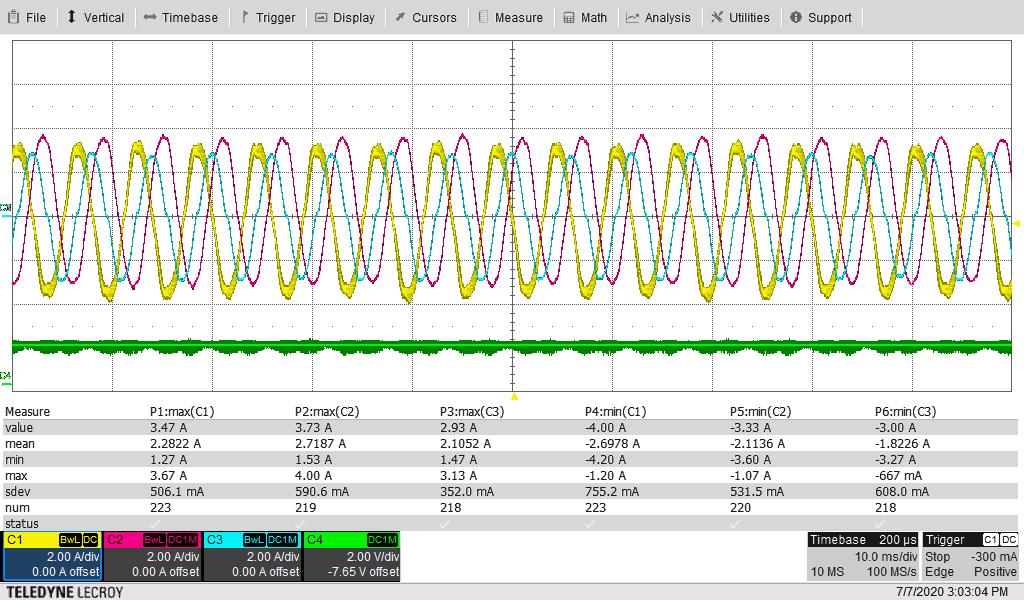
We are using the current reconstruction algorithm from lab 10a - An Example in Space Vector Over Modulation and we saw that the currents on each phase is distorted when reaching 3000RPM on a BLDC motor with a maximum speed of 3750 RPM.
Here are the plots of the phases at different speeds (1000RPM, 2000RPM and 3000RPM):


Q1: I'd like to know if such kind of "distortion" is foreseeable in current reconstruction?
Q2: If this "distortion" is abnormal, what could be the cause?
For your information, we did not bring any modification to the current reconstruction algorithm from Lab 10a.
Thank you for your support.
Regards
