Other Parts Discussed in Thread: C2000WARE
Hello,
I'm designing a digitally current mode controlled buck converter, as a battery charger application. I've designed controller parameters for series type PI and created a model at simulink. I put model of PI_C1 designed from TI for simulink use.
I have inner and outer DCL PI C1 simulink models for current mode controlled buck converter and I simulate my real system at simulink.
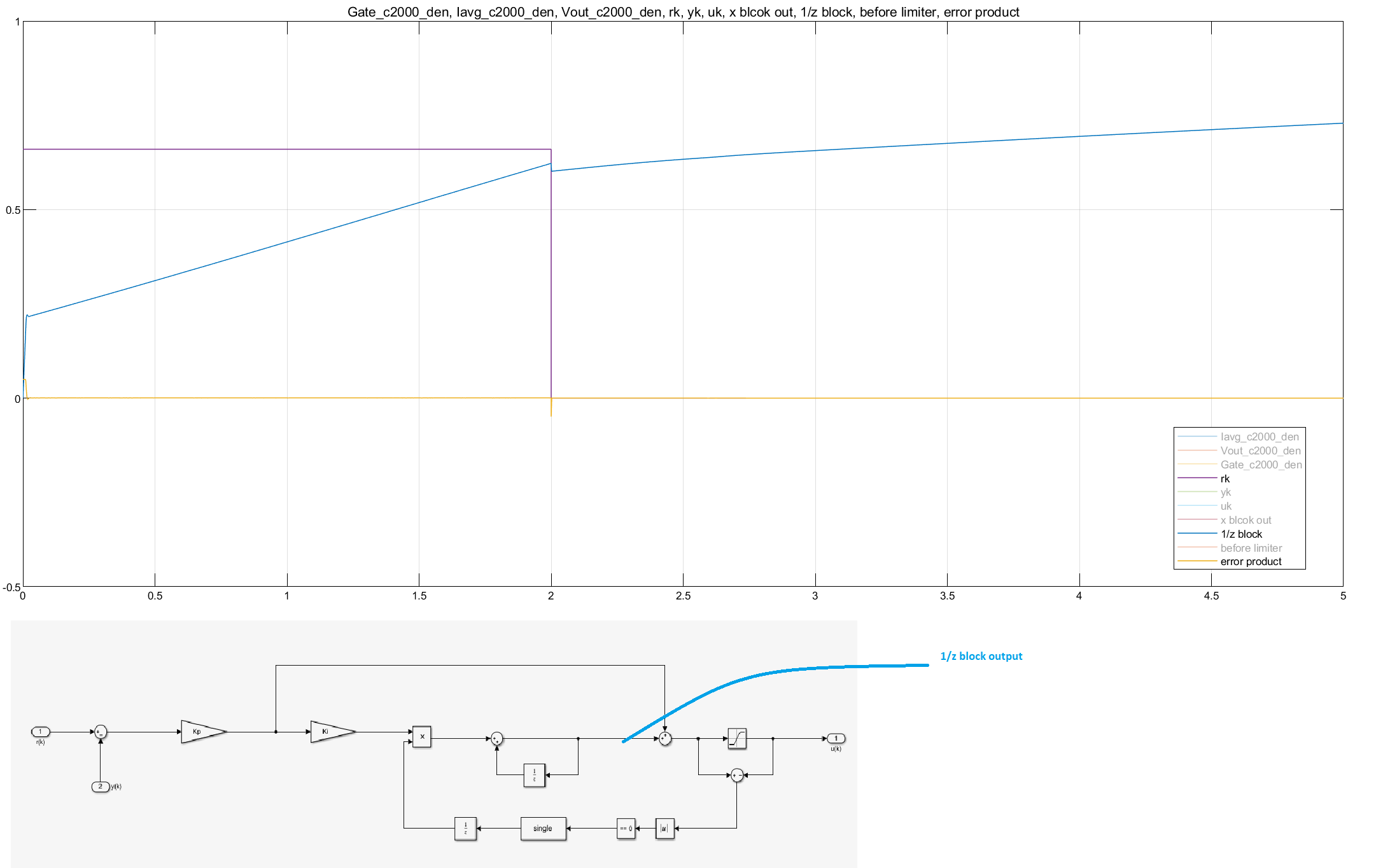
When the outer loop simulink model PI_C1 reaches the preset voltage, its output goes low. However, inner loop PI C1 continuoes to generate output and it doesn't follow its referrence input. I don' know why but I guess its because of windup issue.
What is your comment about my problem and solution about it?
(I can use another series form PI parameters if others solve it. The PI controller simulink models in the C2000 folder is less than real ones. I want to simulate my system at simulink.)
Thank you in advance