Part Number: TMS320F280049
HI Champ,
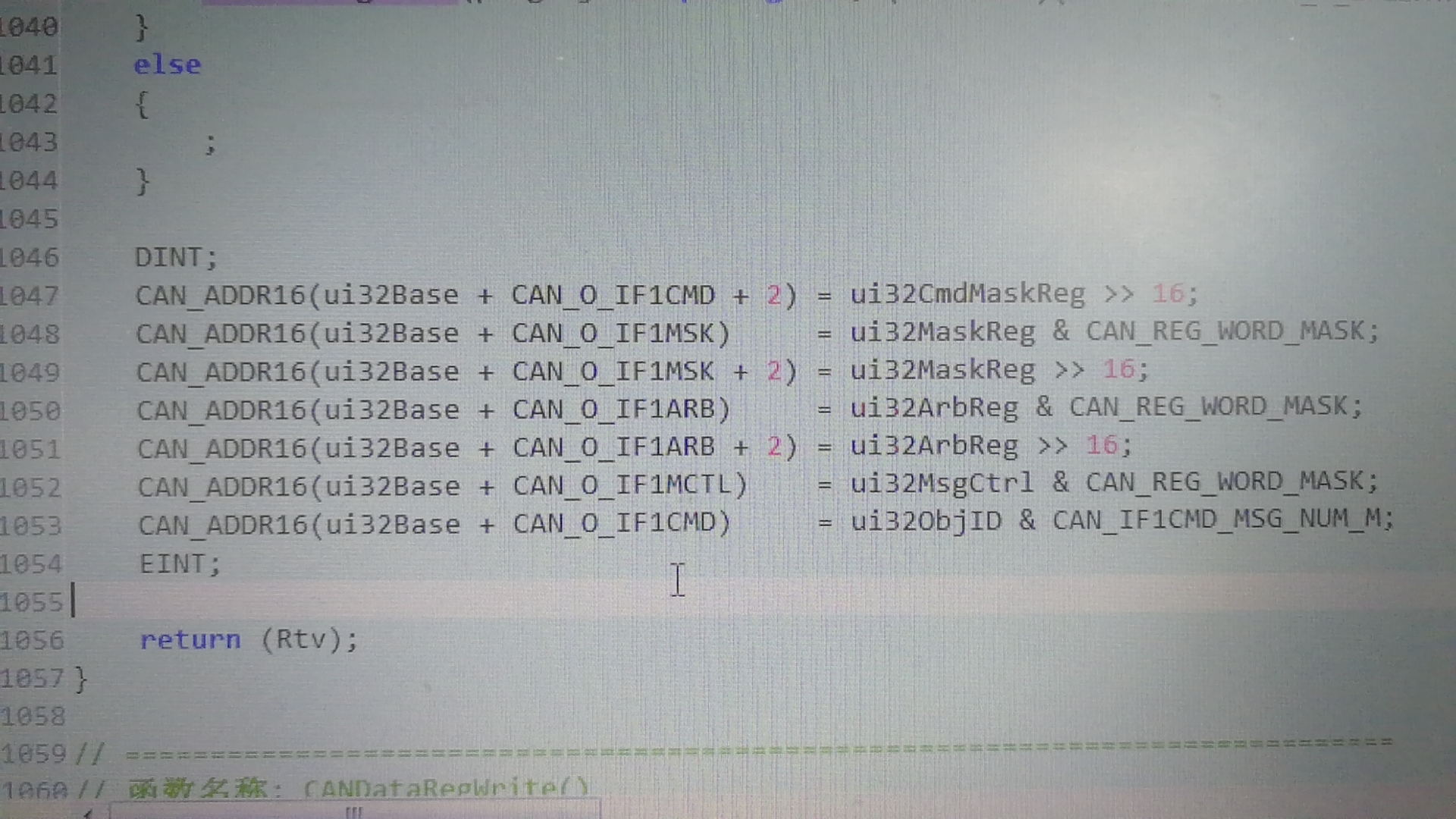
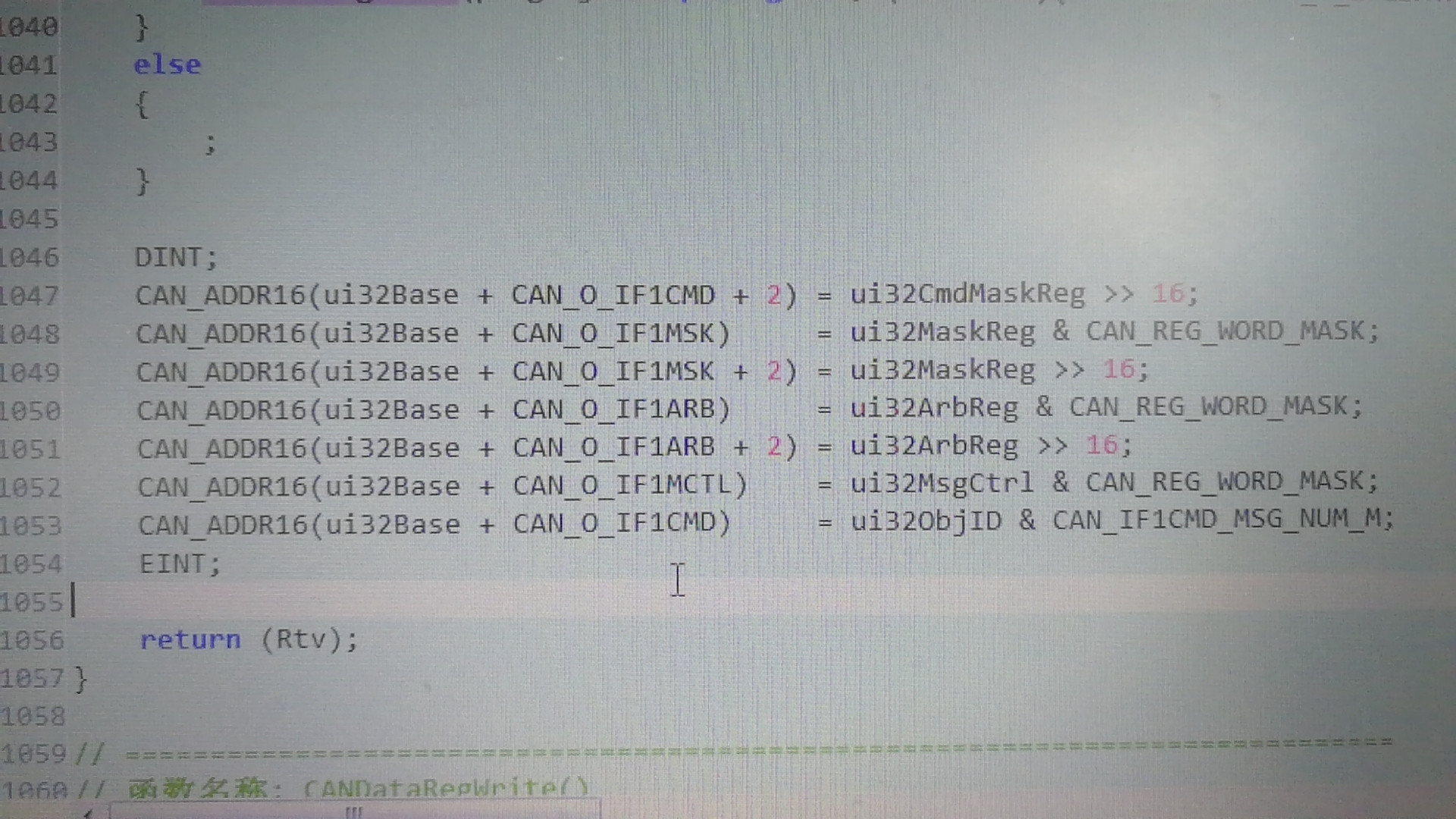
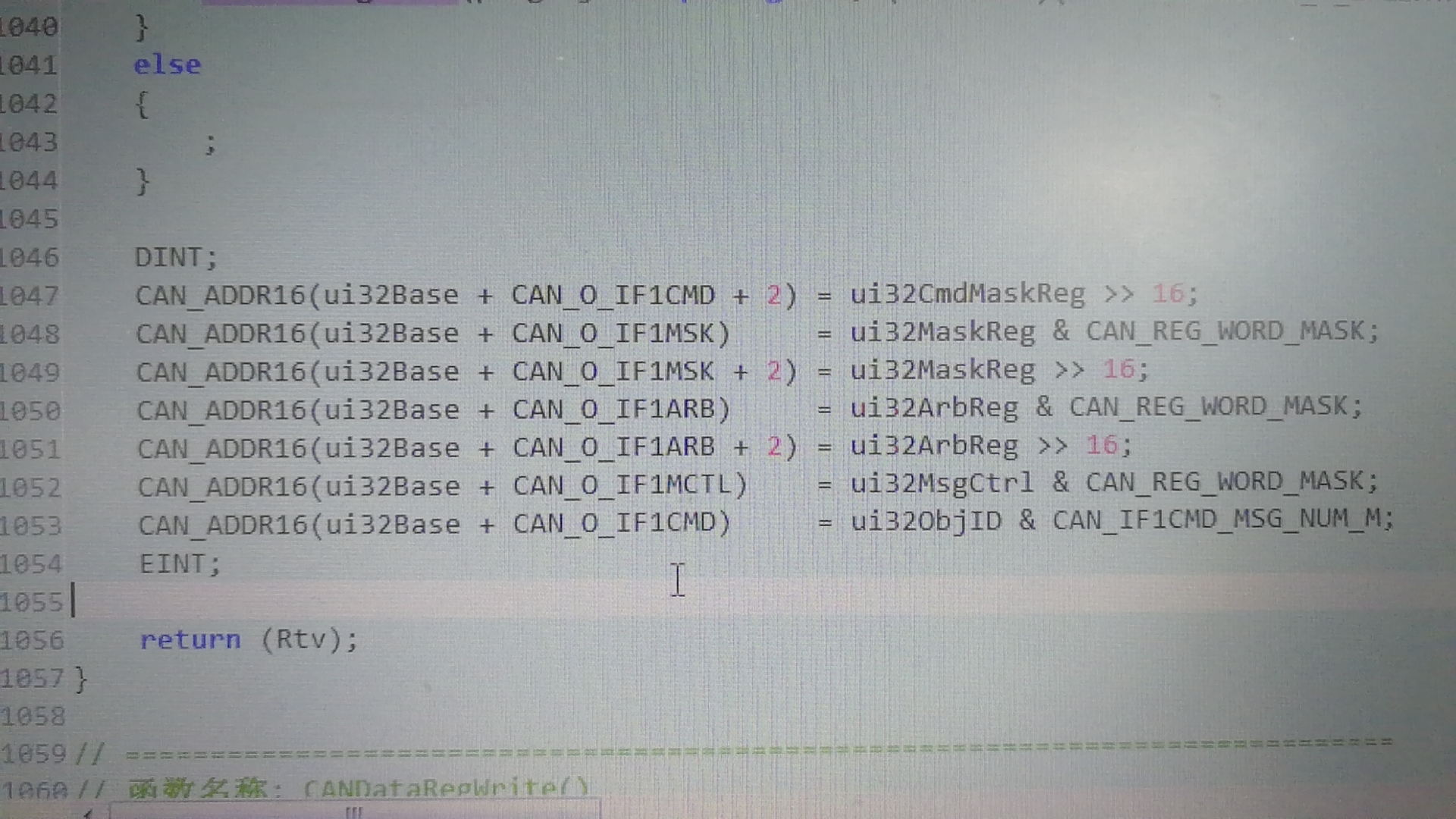
Customer met issue for CAN transmit, the CAN transmit be execute in main loop, if not disable the interrupt (by DINT), the CAN mailbox transmit message ID and Data will mismatch sometime. if disable the interrupt like following way , the CAN transmit will always correct.
Could you help to advise the reason?