


Hi,
I am using PWM7 to generate SOC every 3rd time when TBCTR == ZERO or PRD. I change TBPRD value in interrupt from 400 to 401 . If I do not use global load everything works as expected. However If I also use global load in oneshot mode to load TBPRD value from shadow to active at TBCTR == PRD then the problem occurs. (Moreover It does not occur if shadow to active goes in TBCTR == ZERO).
The problem is that the SOC is every 3rd event, but sporadically it is every 2nd event. (Same if it is every 7th event, it sporadically happens every 6th event)
Here it is how it looks like:
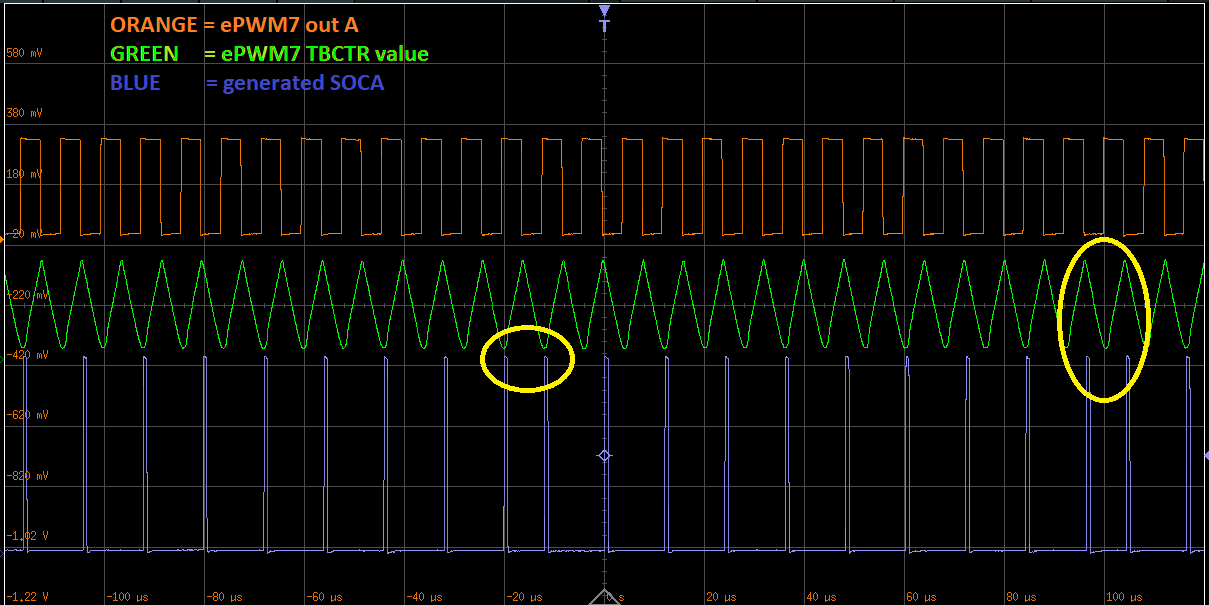
Why this happens?


