Part Number: TMDSHVMTRINSPIN
Other Parts Discussed in Thread: TMDSADAP180TO100, TMS320F280049C, , C2000WARE, TMDXIDDK379D, HVPMSMMTR, TMDSCNCD280049C
Tool/software: Code Composer Studio
Hello team,
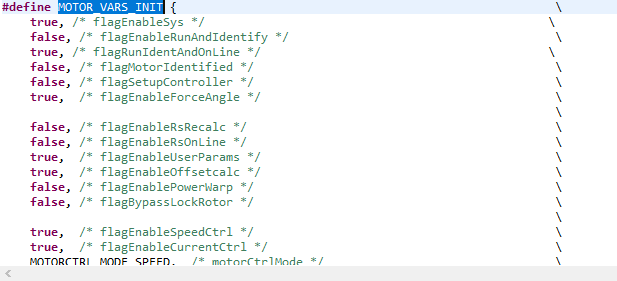
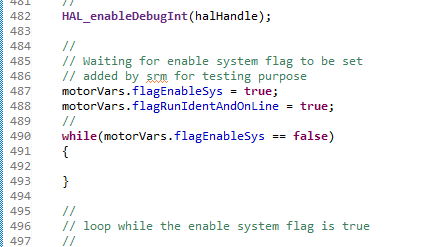
we recently purchased TMDSHVMTRINSPIN development kit, TMS320F280049C control card and TMDSADAP180TO100, we need to load the the example(lab5) which is available "C:\ti\c2000\C2000Ware_MotorControl_SDK_3_00_01_00\solutions\tmdshvmtrinspin\f28004x\ccs\sensorless_foc " , i put the jumper settings of TMDSHVMTRINSPIN as mentioned in hardware guide,
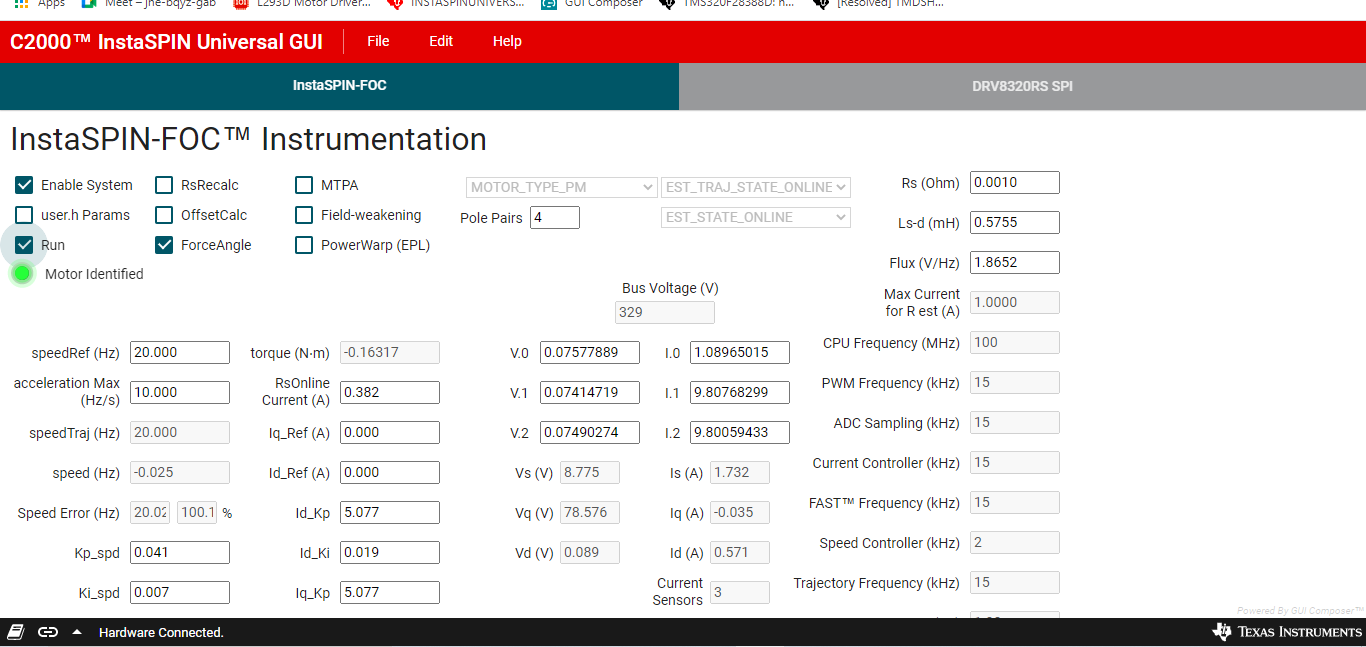
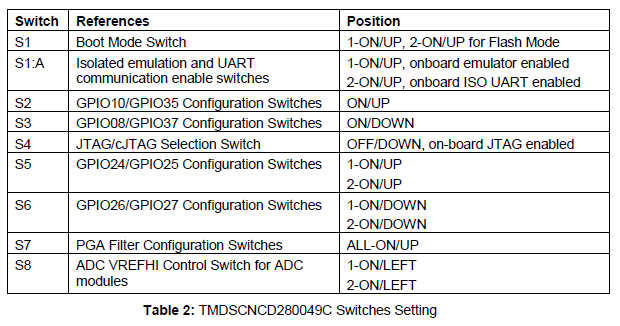
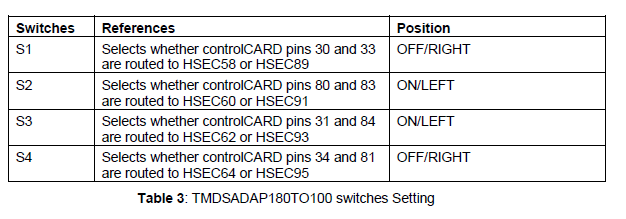
and i put the control card and docking station switches settings as below, when i open the c2000 instaspin gui i get the below error, what are the steps i need to take to avoid this poblem?
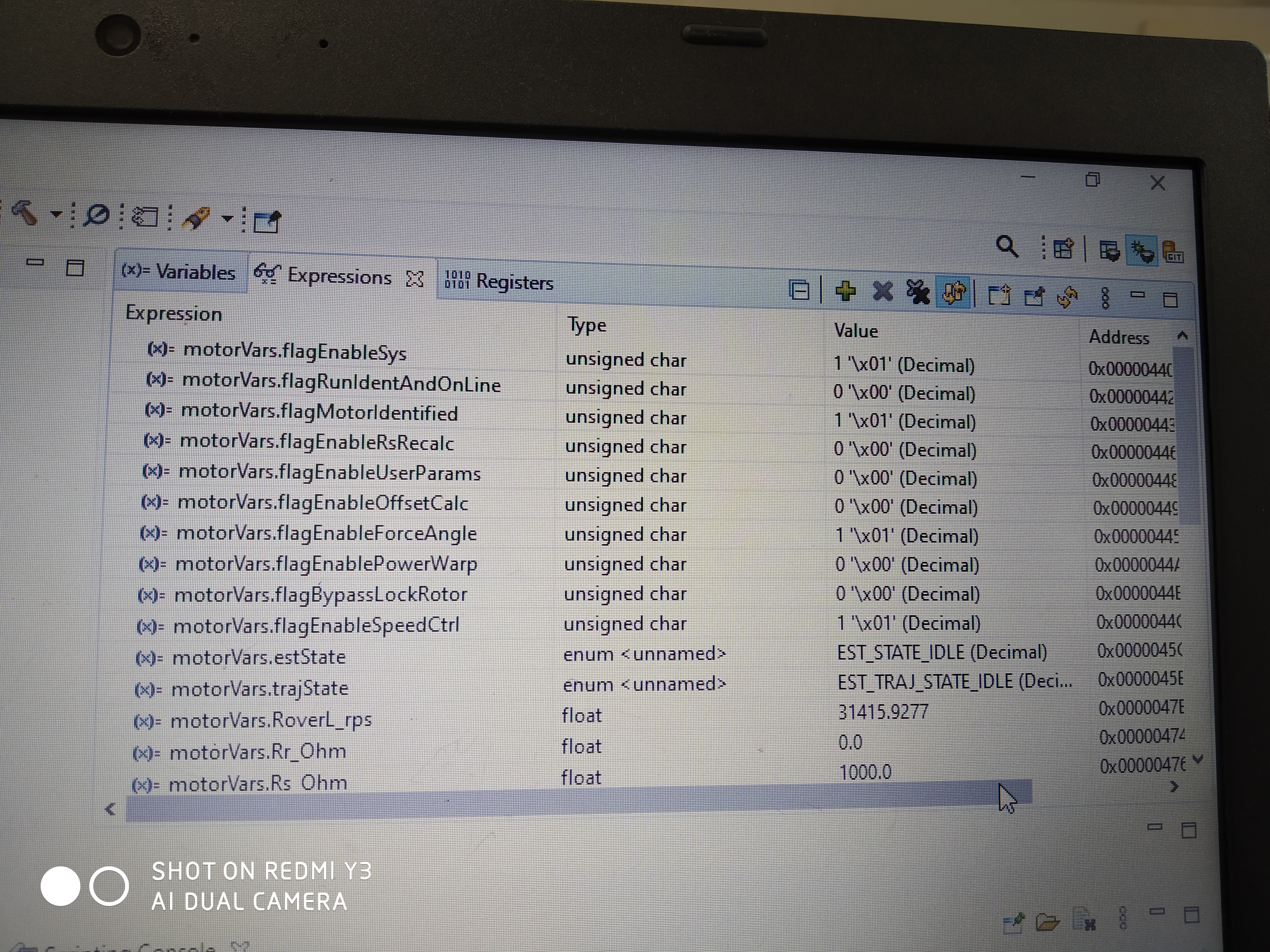
i get the below error "

thank you