Hi,
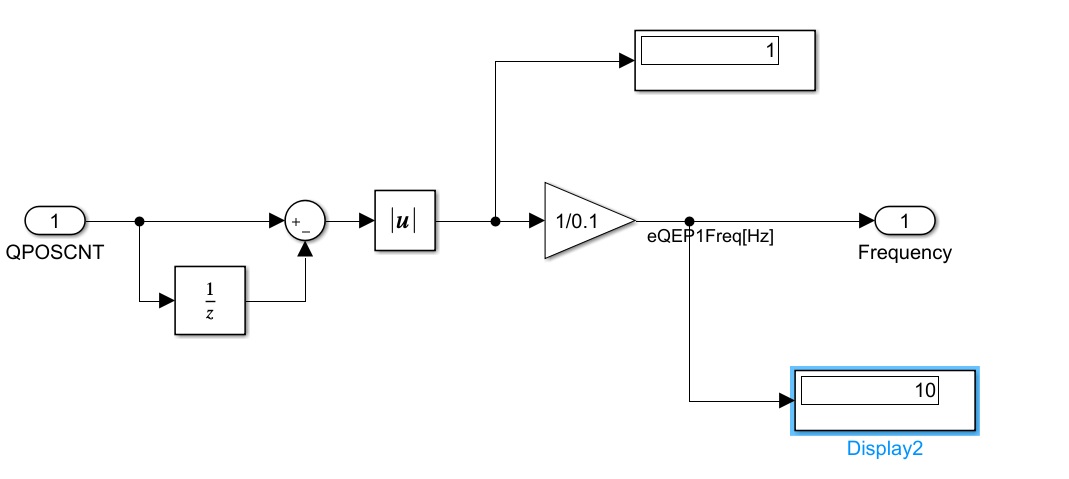
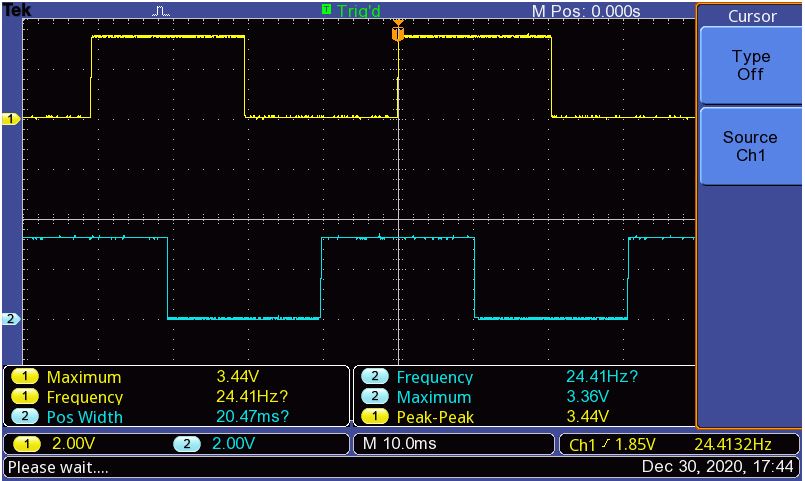
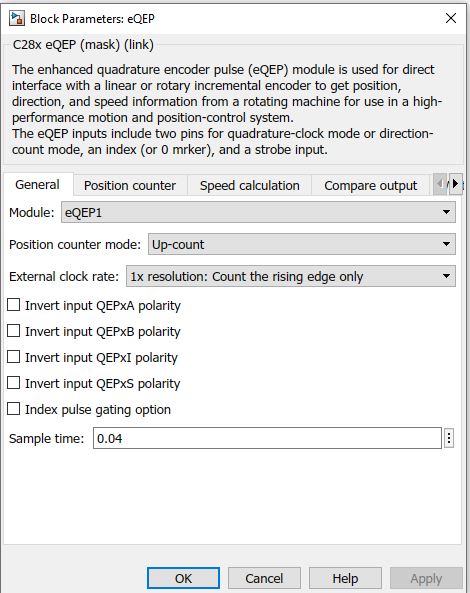
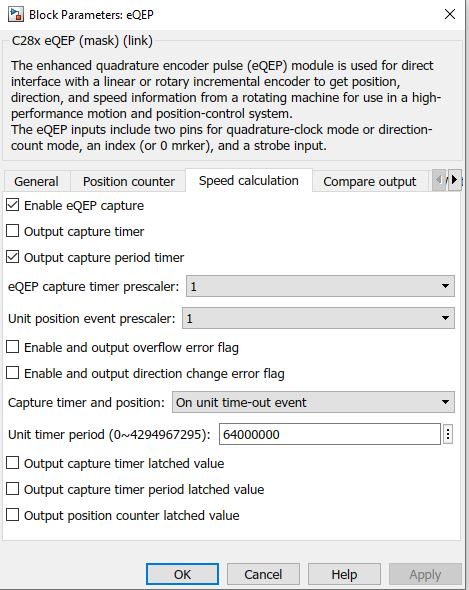
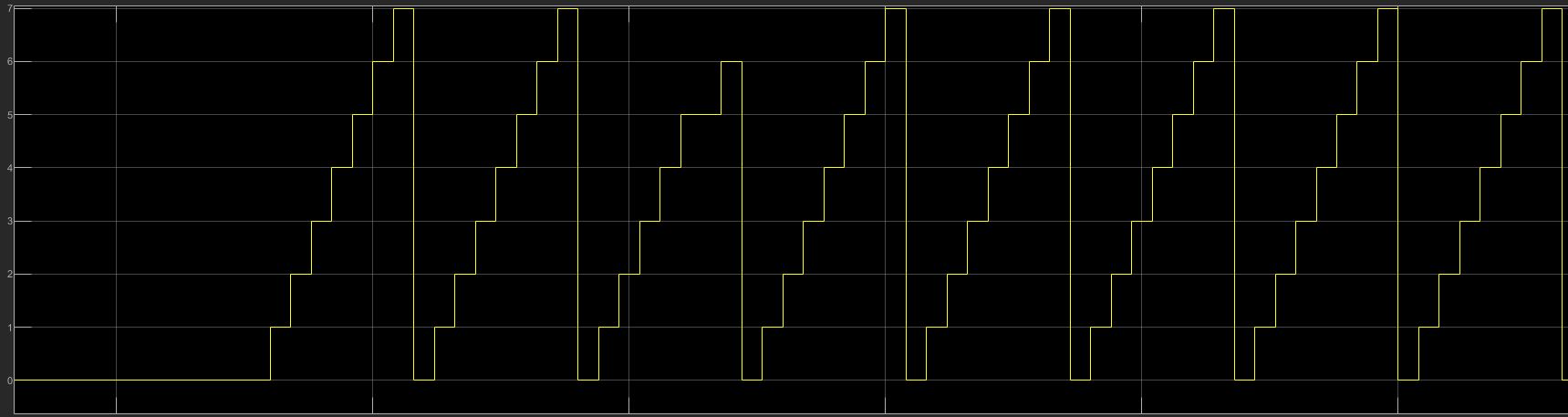
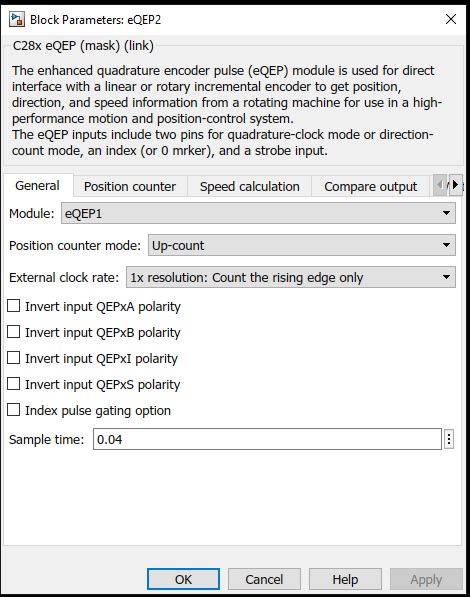
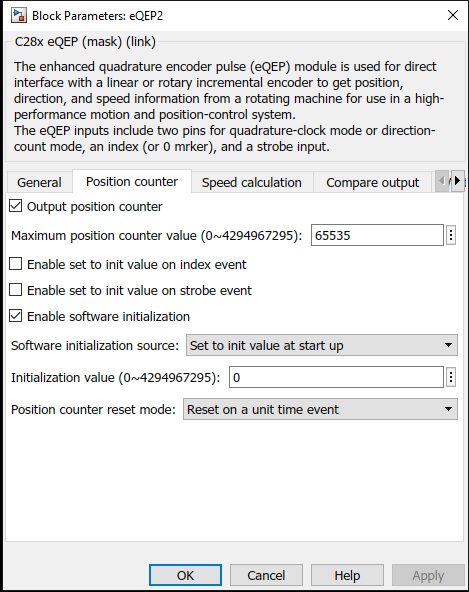
I'm using Matlab/Simulink to read frequency input using eQEP channel but I'm not quite successful. I read the user manual and I understand that the "position counter mode" should set to "Up-count" and the "position counter reset mode" should set to "reset on a unit time event". I'm still confused on how other setting should look like. I found an example online that uses the below logic, but I'm not sure how the calculation is derived:

The eQEP document does not clearly describe how to setup the module to read frequency. Any advise would be appreciated.