Running CC version 9.3 on a custom motor control board with an TMS320F280041C onboard. Compiler TI v18.12.5.LTS, C200Ware version 2.00.00.03, Motor Control SDK 2.00.00.00.
We are trying to run a PMSM in sensorless mode using Lab is07 (described in the InstaSPIN Projects and Labs User's Guide Vers 1.00.00.00) with the FAST algorithm and force angle enabled, with 1 Hz switchover to FAST. The motor's max speed is 370 Hz but when commanding greater than 200 Hz, the motor trips. From the user guide, chapter 14, and previous posts like:
https://e2e.ti.com/support/microcontrollers/c2000/f/171/p/502880/1821864#1821864
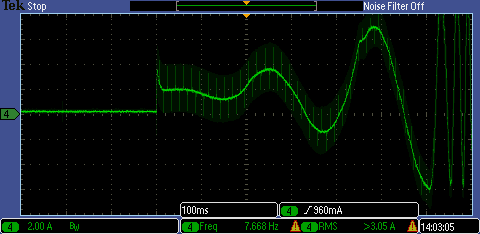
we thought we need to align the rotor first by doing an offline Rs recal. Enabling the Rs recal flag: motorVars.flagEnableRsRecalc in the initialization portion of code before running is07 does not work. In fact, the motor buzzes with the current oscillating and increasing exponentially until the motor current trips.
What should be the correct code to align the rotor at startup, and can the is07 code run afterwards to spin the motor up to, or close to its max speed?
We also noticed that the speed oscillates when a new speed command is given. It eventually settles but we're aware we need to tune the velocity loop.
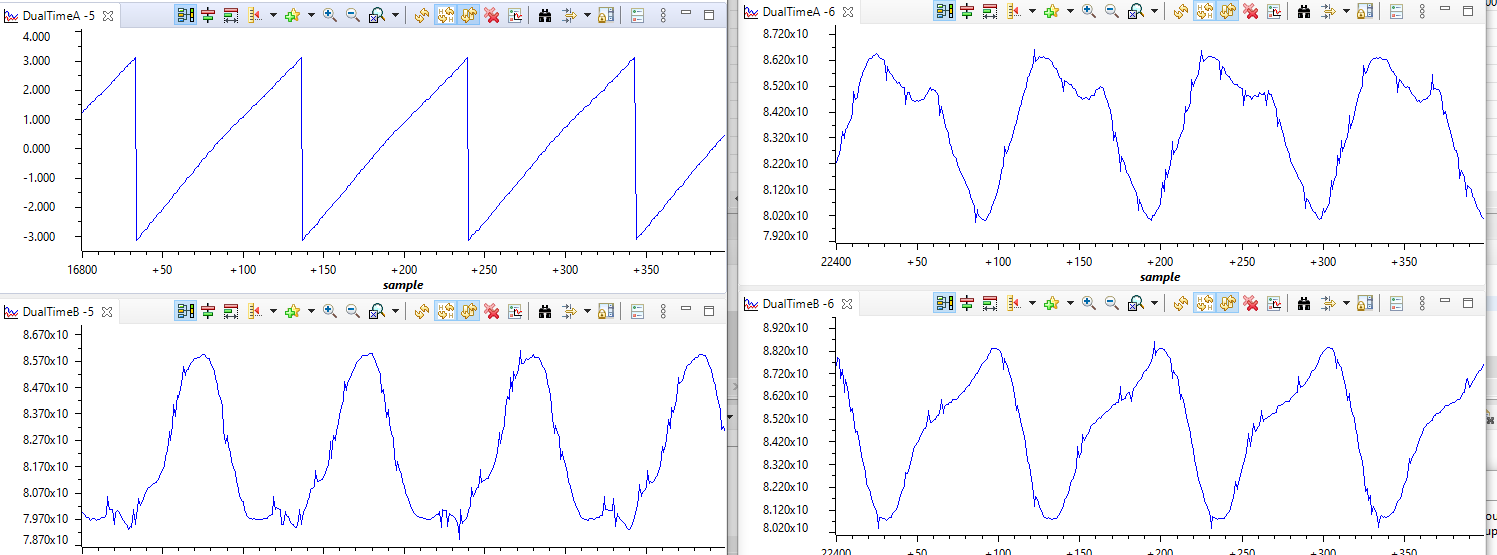
When running the is04 lab we noticed that the Angle generator output was 0 to 2*pi. When running the is07 lab we noticed that the FAST angle output was -pi to +pi. Could this be causing a phase offset of pi, preventing the motor from reaching high speeds? If yes, is there a way to adjust?
We also noticed that the user.h parameters don't exactly match those in the InstaSPIN-FOC User's Guide SPRUHJ1H (June 2019) making debug harder.
Thanks in advance for your help.